Toward Human-in-the-Loop Supervisory Control for Cyber-Physical Networks
Published 7 May 2018 in q-bio.NC and eess.SY | (1805.02611v1)
Abstract: This work proposes a novel approach to include a model of making decision in human brain into the control loop. Employing the methodology developed in mathematical neuroscience, we construct a model that accounts for quality of human decision in supervisory tasks. We specifically focus on adaptive gain theory and the strategy selection problem. The proposed model is shown to be capable of explaining the change of a strategy from compensatory to heuristics in different conditions. We also propose a method to incorporate the effect of internal and external parameters such as stress level and emergencies in the decision model. The model is employed in a supervisory controller that dispatches the jobs between autonomy and a human supervisor in an efficient way.
The paper introduces a mathematically formalized framework that integrates cognitive-neuroscientific models with supervisory control in cyber-physical networks.
It employs drift-diffusion and leaky integrator models to capture human decision-making under varying cognitive states and task complexities.
It demonstrates improved system stability and success rates by dynamically assigning tasks based on operator cognitive state and environmental conditions.
Human-in-the-Loop Supervisory Control for Cyber-Physical Networks: Cognitive-Neuroscientific Controller Integration
Introduction and Motivation
The paper "Toward Human-in-the-Loop Supervisory Control for Cyber-Physical Networks" (1805.02611) investigates the integration of cognitive-neuroscientific models of human decision making into supervisory control systems for cyber-physical networks. Recognizing the pivotal impact of human operators in safety-critical systems and the shortcomings of existing approaches that either statically weight autonomy or neglect the operator's fluctuating cognitive state, the authors propose a mathematically formalized approach for adaptive, task-driven, and operator-state–aware supervisory control.
Crucially, the work moves beyond the reliance on empirical distributions for operator decisions by embedding mechanistic neuroscientific models that account for the modulating effects of internal states (e.g., stress, fatigue) and environmental conditions (e.g., emergencies), thereby enhancing the robustness and reliability of the supervisory control paradigm.
Mathematical Models of Human Decision Making
The core of the approach is the formal modeling of human decision-making tasks within a comprehensive framework that generalizes across varying numbers of cues and choices. For binary forced-choice scenarios, the paper utilizes the drift-diffusion model (DDM), formalized as a leaky integrator driven by stochastic evidence accumulation:
dx(t)=(μ−λx(t))dt+σdW
This formulation captures information leakage, bounded rationality, and sensory uncertainty. Extensions to multi-cue and multi-choice scenarios are implemented through a leaky, mutually inhibitory integrator (race) model:
dxi=−kxi−j=i∑wxj+Sidt+σdWi
With increasing task complexity, evidence accumulation is distributed both temporally (across sequential cue presentations) and functionally (across multiple neuronal pools tied to choices), reflecting the underlying neuro-cognitive architecture.
Strategy Selection via Adaptive Gain Theory
A major theoretical advance in the paper is the formalization of strategy selection—the dynamic shift between compensatory (weighted additive) and heuristic (non-compensatory) decision making—through the lens of adaptive gain theory. The weighting of cues is determined through a softmax transformation dependent on cue validity and a neuronal gain parameter γE:
am=∑i=1MeγEqieγEqm
An increase in γE sharpens the selection, fostering heuristic behavior when task demands, environmental stressors, or internal arousal warrant fast but less exhaustive evidence integration.
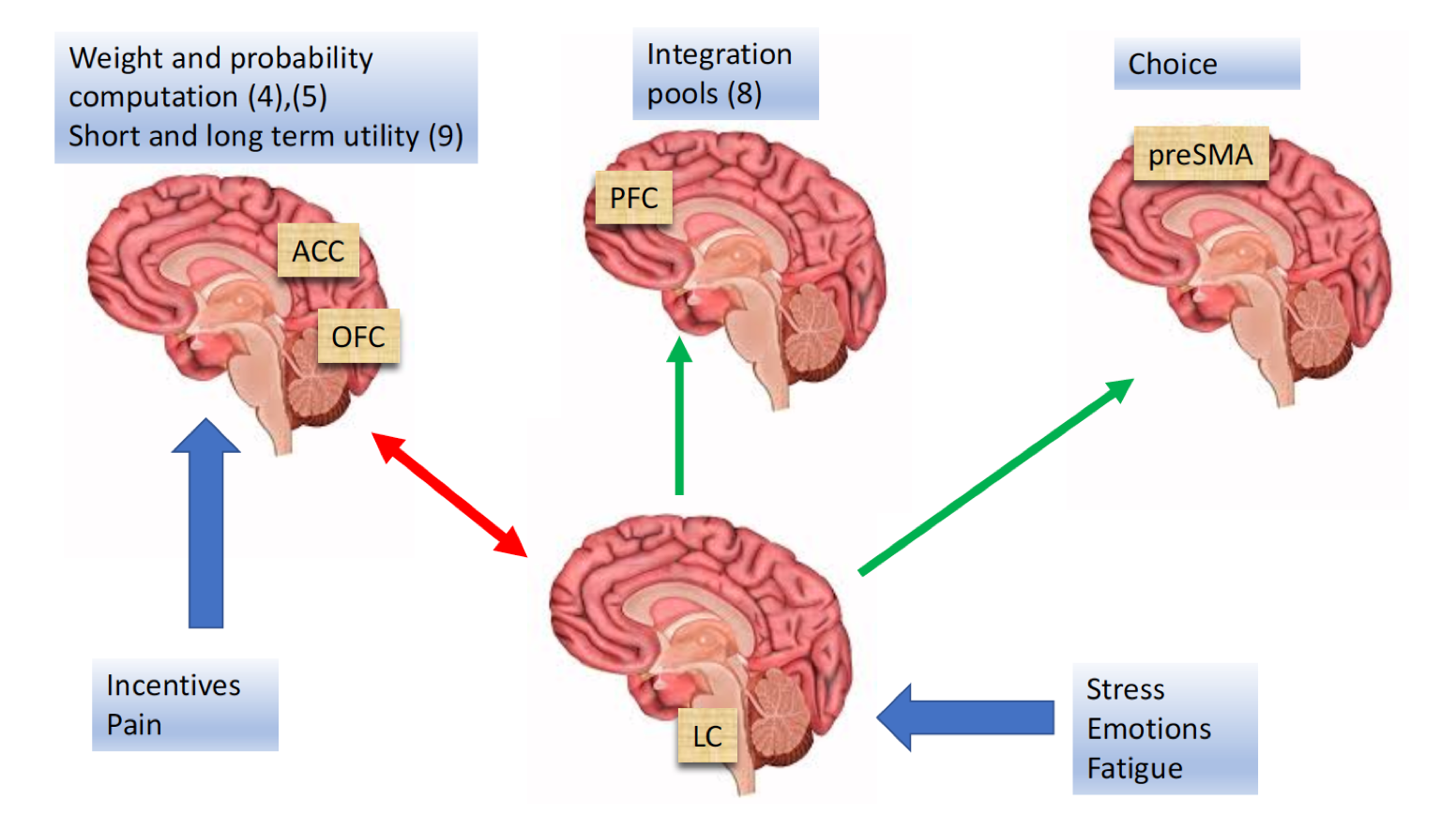
Adaptive gain, governed by the locus coeruleus–norepinephrine (LC-NE) system, is modeled at the neuronal population level, specifically reflecting phasic and tonic modes. The mapping between cognitive strategy shifts and LC-NE dynamics supports a unified explanation for observed changes in operator behavior under varying arousal, stress, or reward contingencies.
Figure 1: Brain regions and their interconnections responsible for decision process control as used in the proposed model, with references to associated mathematical equations.
Neurobiological Integration and Control Loop Design
The proposed framework links the mathematical abstraction of evidence accumulation to biologically plausible models of neuronal population dynamics, grounded in the physiology of the lateral intraparietal cortex (LIP) and its interaction with LC-NE neuromodulation. The block-level organization links fast, sensory-driven responses to slower, motivationally mediated gain adaptation.
In practical terms, this cognitive-neuroscientific loop is embedded in a supervisory control architecture where both the human operator and autonomous agents are dynamically allocated tasks based on operator cognitive state (indexed by γE,γI) and task complexity (mi). The controller maintains estimations of operator success probability p0(mi,Γi) using reward rate metrics derived from the operator's neuro-cognitive state, and computational agent success probability p1(mi).
Task dispatching is determined by maximizing average system success rate, effectively enabling the allocation of critical or cognitively demanding tasks to the operator only when their estimated performance is optimal, otherwise deferring to the computational model.
Experimental Validation and Numerical Results
The methodology is validated through simulations of a 2AFC task using a detailed neural population model (V1, MT, LIP) and performance analyses in the context of variable task complexity and operator internal states. Numerical results demonstrate:
Effective maintenance of operator neuronal gain near optimality: The controller adapts task assignment to keep operator gains within the high-performance regime.
Stabilization of system-level success rates: The integration of neuro-cognitively informed supervisor allocation produces higher and more stable success rates compared to direct or random assignment.
This is exemplified by the evolution of gain parameters and the resulting effects on both individual and average success rates (depicted in the simulation results).
Practical and Theoretical Implications
The integration of cognitively plausible models of human decision making into supervisory control represents a significant step toward robust, human-aware AI/automation systems. By explicitly modeling operator success probabilities as a function of biophysical cognitive parameters, supervisory controllers can pre-empt operator overload, reduce error rates in high-stakes operations, and optimize resource allocation in dynamic, uncertain environments.
From a theoretical perspective, the formal mapping between cognitive, neurophysiological, and control-theoretic constructs enables deeper, mechanistic explanations for human-machine interaction phenomena, and forms the basis for future investigation into the stability and resilience of such hybrid systems. Notably, the paper suggests further work is needed in:
Refining operator cognitive models to include richer biophysical detail and non-linearities
Systematically estimating computational model performance in highly variable or adversarial environments
The paper presents a prototype framework that bridges neuroscience, cognitive modeling, and control engineering, demonstrating the utility of human-in-the-loop supervisory control schemes that are dynamically tailored to the operator's neuro-cognitive state. The two-stage decision and strategy selection model, grounded in adaptive gain theory, provides both practical mechanisms for optimizing shared autonomy and theoretical insights into the psycho-neurophysiological basis of supervisory control.
Continued research along this direction is poised to further enhance the resilience and safety of critical cyber-physical infrastructures by developing ever-more accurate models of operator cognition and adaptive, context-aware control logic.