- The paper presents a memory-efficient framework that uses a hierarchical tree map representation to encode both 2D and 3D shapes.
- It achieves comparable uniformity and faster shape entry times while reducing memory usage by up to two orders of magnitude compared to full-grid maps.
- Physical experiments with UAV swarms validate the approach, demonstrating scalable, assignment-free shape assembly under real-world constraints.
Memory-Efficient 2D/3D Shape Assembly of Robot Swarms
The paper "Memory-Efficient 2D/3D Shape Assembly of Robot Swarms" (2509.26518) presents a novel framework for the assembly of complex shapes by robot swarms using memory-efficient methods. The work introduces a tree map representation that significantly reduces memory overhead compared to traditional image-based approaches, enabling scalable solutions for both 2D and 3D shape construction.
Introduction to Shape Assembly in Robot Swarms
Robot swarm systems are inspired by the behaviors of social insects, like fire ants, which self-organize into structures using minimal communication and individualistic rule-based interactions. Traditionally, swarm shape assembly approaches fall into two main categories: assignment-based and assignment-free methods. Assignment-based methods involve explicitly allocating robots to target positions using centralized optimization, thus suffering from scalability issues. Assignment-free methods, on the other hand, exploit emergent behaviors, such as morphogenesis, mean-shift exploration, and artificial potential fields, which allow for more flexible and scalable assembly solutions.
Assignment-free methods have recently leveraged image-based approaches with mean-shift strategies for swarm shape assembly but require high-resolution maps that can become prohibitive in terms of memory usage. This is especially challenging in 3D environments, where computational and memory demands increase exponentially.
Proposed Memory-Efficient Framework
To address the limitations of memory-intensive image-based methods, this paper proposes a novel tree map representation for shape encoding. This method hierarchically encodes user-specified shapes and applies to both 2D and 3D settings, allowing for significant reductions in memory requirements.
Shape Encoding and Tree Map Representation
The proposed framework begins by encoding the target shape using a tree map that stores data in a hierarchical manner. This process involves subdividing the target shape image into tree nodes while maintaining top-down search capabilities. The tree structure reduces memory usage drastically when compared to full-grid maps by representing large homogeneous areas with single nodes and dynamically managing heterogeneous regions with variable node sizes.
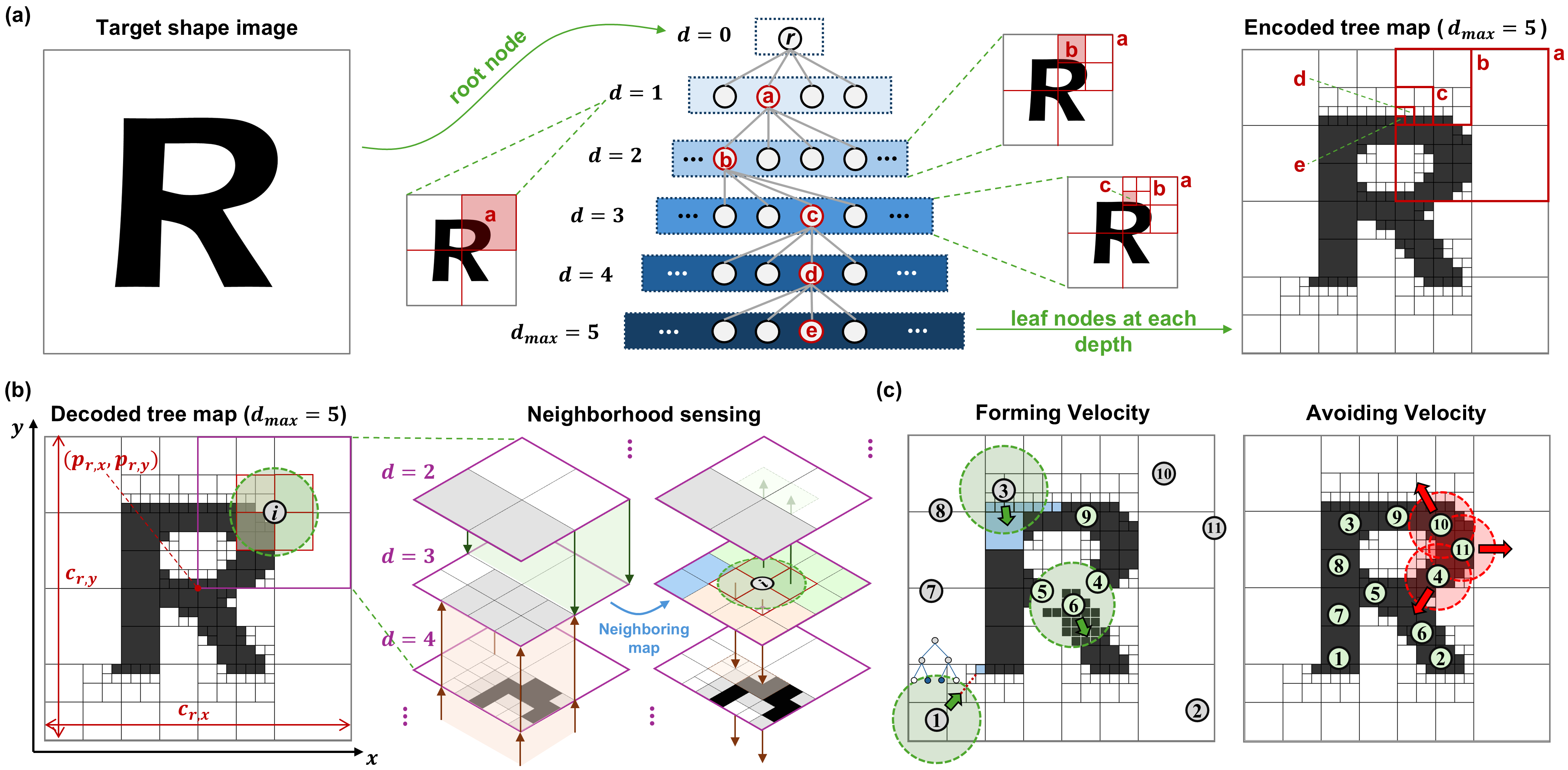
Figure 1: Overview of the Proposed Framework. (a) Shape encoding: The target shape image is shown on the left, while the middle and right panels depict the encoded tree map as a tree structure and a grid view, respectively.
Shape Decoding and Robot Localization
The framework decodes each node within the tree map into physical positions and constructs a neighboring map for each robot to sense its local area. This method facilitates distributed decision-making for robots to locate themselves and choose candidate nodes for forming the desired shape, effectively implementing assignment-free shape assembly.
Behavior-Based Distributed Controller
A behavior-based distributed controller is designed to guide the robots using two velocity components: forming velocity for shape assembly and avoiding velocity to prevent collisions. This controller exploits the hierarchical data structure for efficient decision-making, allowing robots to move towards target areas while maintaining safe distances from one another.
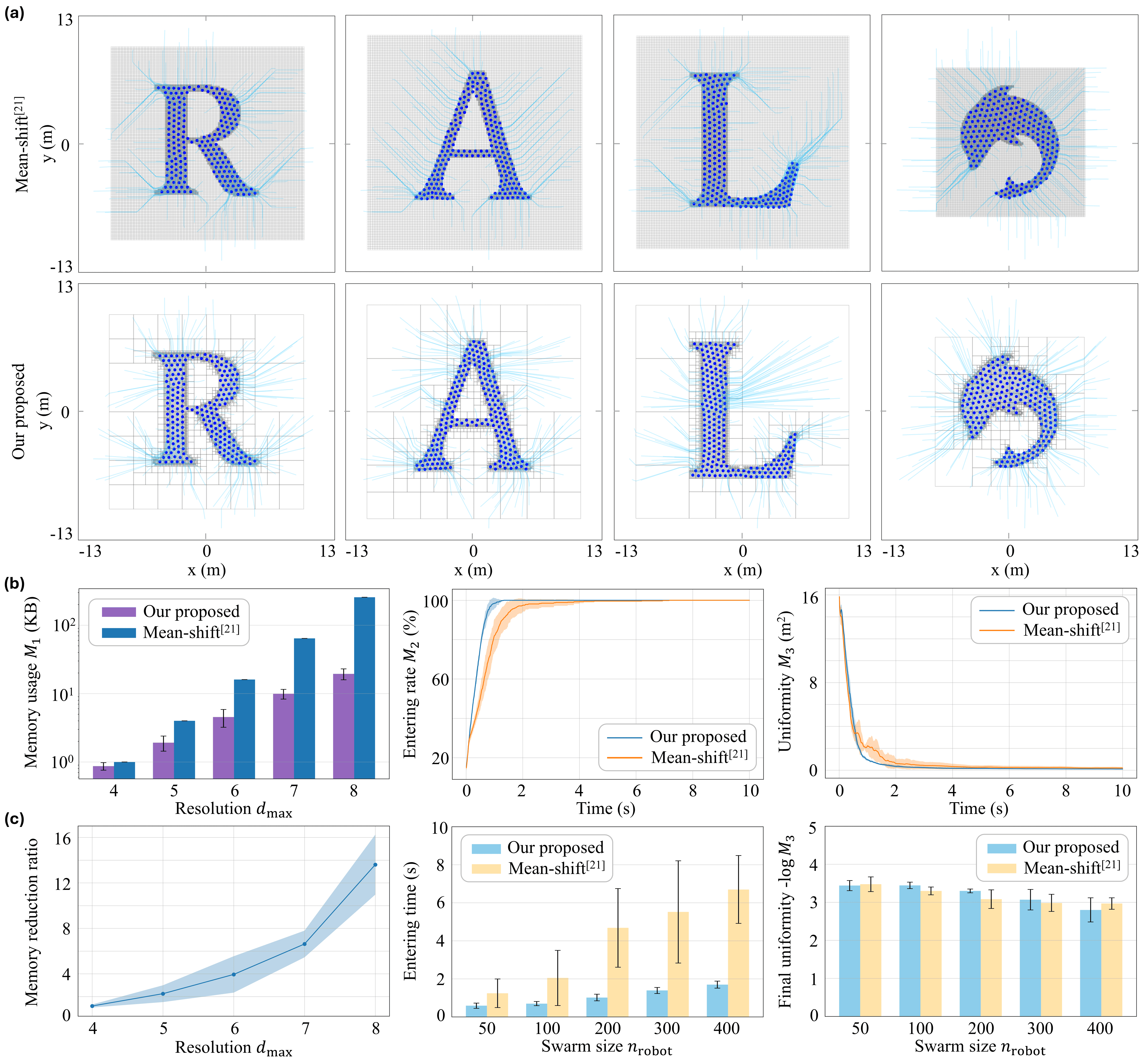
Figure 2: 2D Simulation Results. (a) Robot trajectories for four target shapes with nrobot=200. The first row shows baseline results using full-grid maps, and the second row shows results of the proposed method with tree maps.
Results and Evaluation
Extensive simulations demonstrate that the proposed approach achieves comparable uniformity and faster shape entering times while reducing memory usage by one to two orders of magnitude. The algorithm converges consistently across various shapes and swarm sizes, proving its scalability and robustness.
3D Simulation Results
3D simulations further confirm the framework's efficacy and demonstrate its ability to assemble complex shapes reliably. Memory usage was reduced significantly, and swarm shape assembly maintained high consistency across simulations, reflecting the practical benefits of the method in high-dimensional environments.
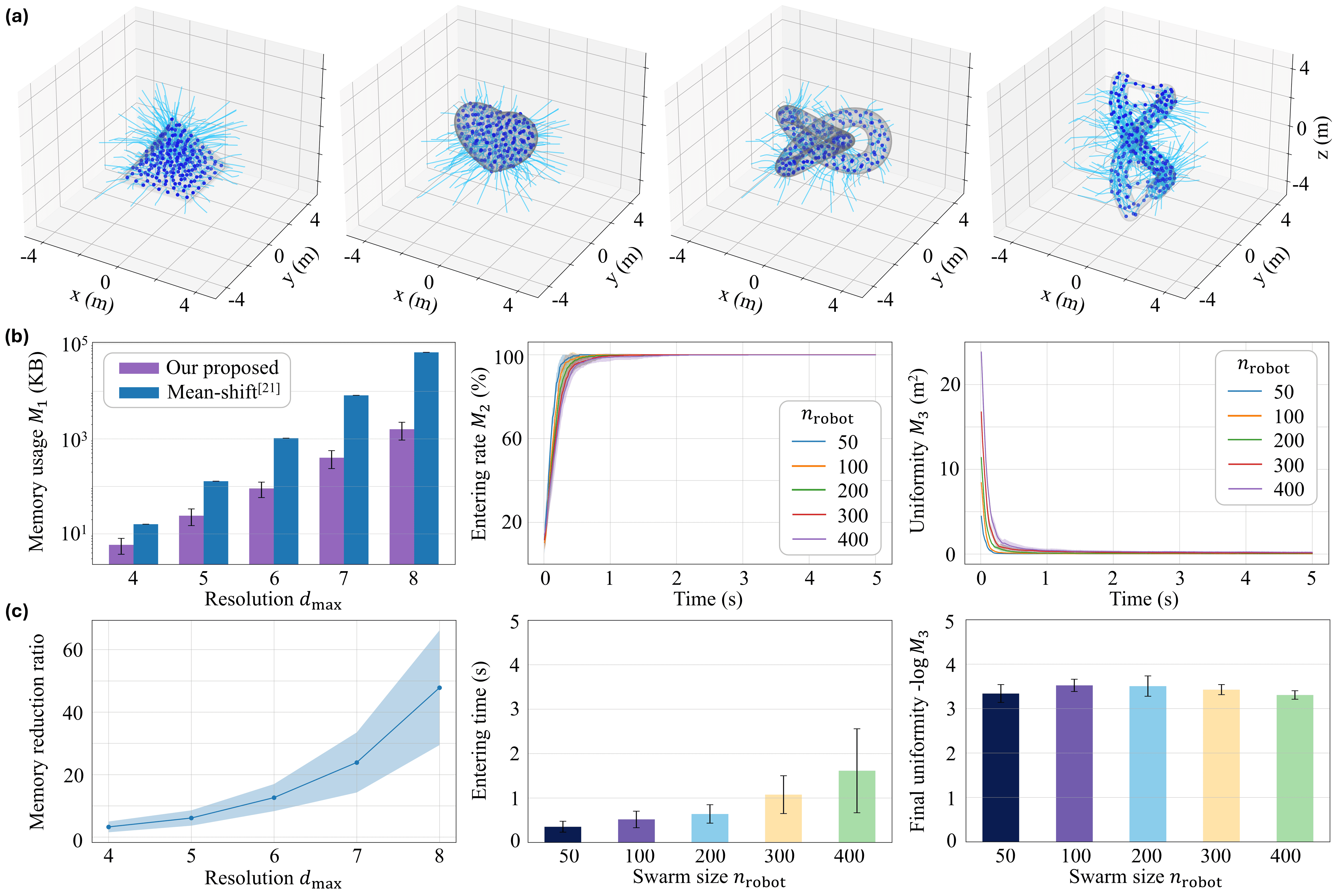
Figure 3: Robot trajectories from the proposed method for four target shapes with $n_\text{robot}=200.
Physical Experiments
Experiments with UAV swarms validate the framework's real-world applicability. The experiments successfully demonstrate UAVs forming both 3D triangle and arrow configurations with efficient shape entry and robust assembly despite hardware constraints.
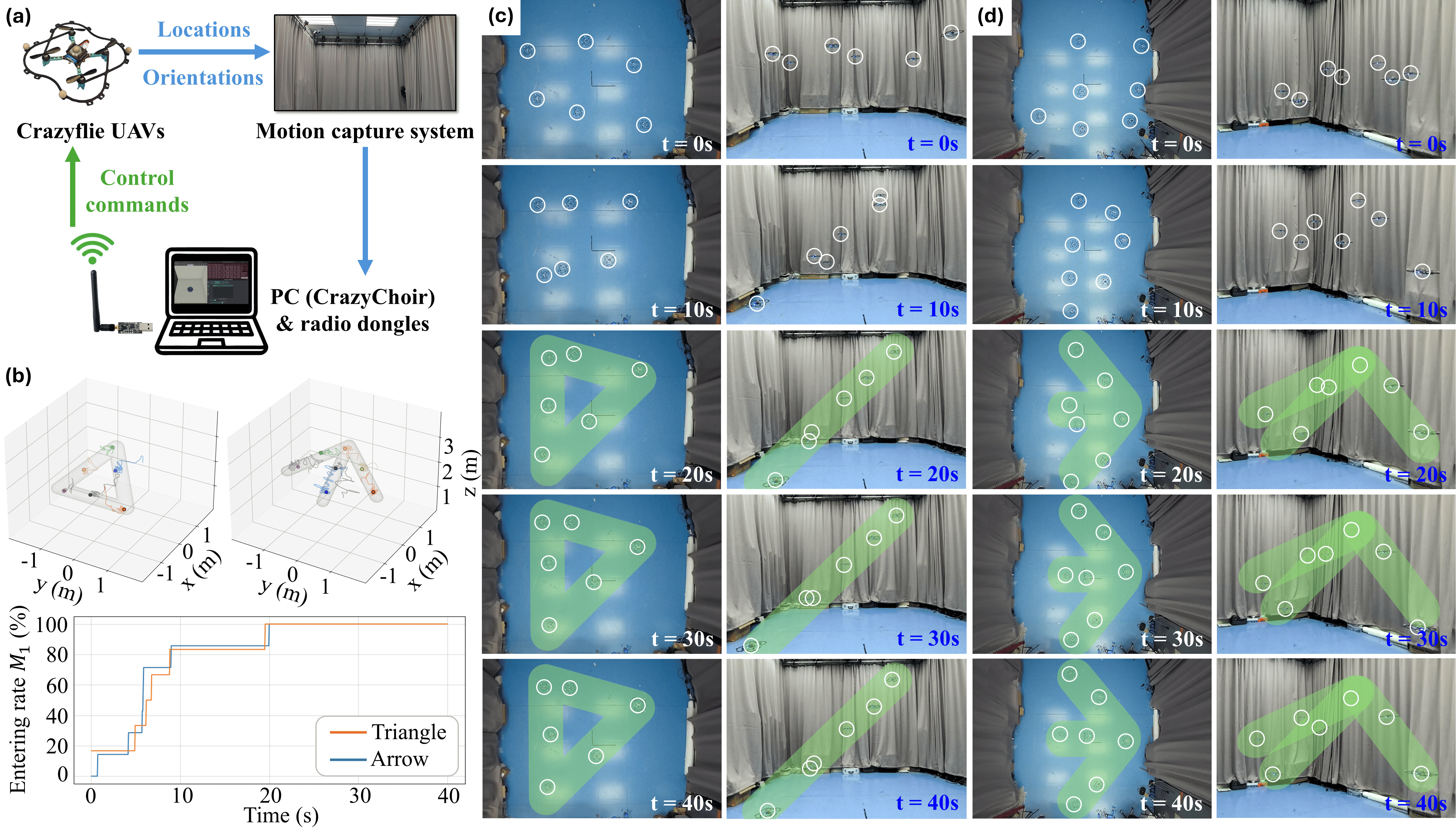
Figure 4: Physical Experiment Results. (b) Robot trajectories and entering rate. Snapshots of the swarm during the experiments for triangle and arrow assembly.
Conclusion
The presented framework offers a robust, memory-efficient solution for 2D and 3D shape assembly in robot swarms, applicable to scenarios requiring scalable, rapid deployment without centralized control. By significantly reducing computational requirements and maintaining high uniformity and entry speed, this approach opens pathways for future research into distributed, efficient communication strategies suitable for real-world swarm robotic deployments.
Continued research will aim to address limitations such as current dependencies on motion capture systems and explore peer-to-peer communication strategies to enhance protocol robustness in variable network conditions.

