- The paper introduces ivS-Graphs, a real-time RGB-D SLAM system that incorporates BIM-derived wall constraints to significantly reduce drift in construction monitoring.
- The paper details a two-stage wall matching and BIM-constrained factor graph optimization that achieves robust mapping with minimal computational overhead, running at 23.3 FPS.
- The paper validates the approach on real-world datasets, showing a 23.71% reduction in Absolute Trajectory Error and robust performance despite up to 30% missing BIM walls.
The integration of Building Information Models (BIM) with Visual Simultaneous Localization and Mapping (SLAM) presents a promising direction for robust, drift-minimized mapping in construction environments. The paper "BIM Informed Visual SLAM for Construction Monitoring" (2509.13972) introduces ivS-Graphs, a real-time RGB-D SLAM system that leverages BIM as a structural prior to constrain and correct the evolving as-built map. This essay provides a technical summary and critical analysis of the methodology, experimental results, and implications for future research and deployment.
Motivation and Problem Setting
Construction monitoring requires accurate, up-to-date alignment between the as-built state and the as-planned design. While LiDAR-based SLAM offers high geometric fidelity, its hardware constraints limit deployment on portable platforms. Visual SLAM, using lightweight RGB-D sensors, is more practical but suffers from drift and mapping errors in environments characterized by repetitive layouts, occlusions, and low-texture surfaces. The core hypothesis of this work is that incorporating BIM-derived structural priors—specifically, wall geometries—into the SLAM back-end can significantly reduce drift and improve map consistency, even in partially constructed or evolving environments.
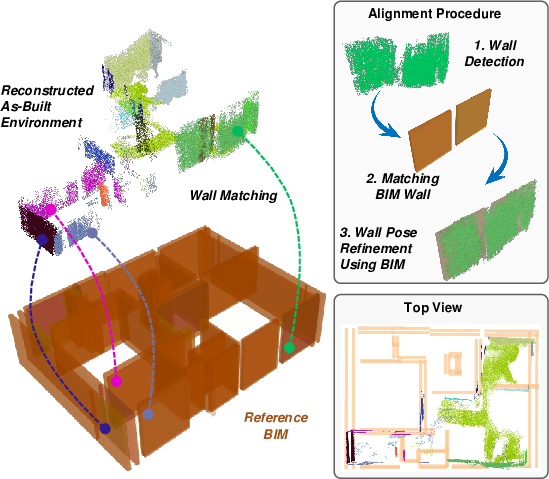
Figure 1: Visualization of the proposed BIM-informed RGB-D SLAM system, showing alignment between the as-planned BIM and the reconstructed as-built map via wall correspondences.
System Architecture and Methodology
The proposed system, ivS-Graphs, extends the vS-Graphs visual SLAM backbone by introducing BIM-informed constraints into the back-end optimization. The architecture comprises three principal modules:
- SLAM Backbone: vS-Graphs, itself an extension of ORB-SLAM3, provides feature tracking, local mapping, and planar wall extraction from RGB-D data. The scene is represented as a factor graph with keyframes, map points, and wall segments.
- Wall Matching: A two-stage process establishes correspondences between detected walls and BIM walls. Initial alignment is achieved by matching two perpendicular walls, requiring only the IDs of two BIM walls expected to be observed first. The rigid transformation between BIM and SLAM frames is estimated via least-squares minimization of plane residuals. Continuous matching uses a combined score of plane-parameter distance and projected centroid distance to maintain and update associations as the map evolves.
- BIM-Constrained Back-End: Matched wall pairs are introduced as constraints in the factor graph. BIM walls are fixed nodes, while detected walls are optimizable. The wall-to-wall factor penalizes deviations between associated wall planes, with the covariance scaled by the confidence of the match. The total cost function includes visual reprojection, pose-to-wall, and BIM wall-to-wall residuals, optimized periodically to propagate architectural consistency.
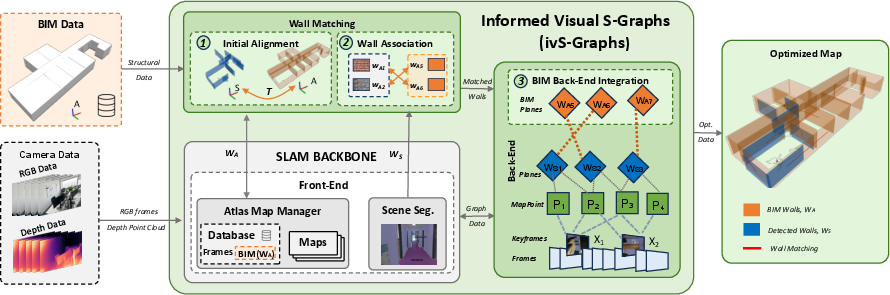
Figure 2: System architecture of ivS-Graphs, highlighting the integration of BIM constraints into the SLAM back-end via wall association and graph optimization.
Experimental Evaluation
Datasets and Baselines
The evaluation uses real-world datasets collected in office buildings and active construction sites, each with corresponding BIM models and LiDAR ground truth. Baselines include ORB-SLAM3, BAD-SLAM, and vS-Graphs (without BIM constraints).
Trajectory and Mapping Accuracy
The primary metrics are Absolute Trajectory Error (ATE) and point cloud Root Mean Square Error (RMSE) relative to BIM ground truth. ivS-Graphs achieves a mean ATE reduction of 23.71% and a mean RMSE reduction of 7.14% compared to vS-Graphs. Improvements are most pronounced in larger environments, where drift in pure visual SLAM accumulates significantly.
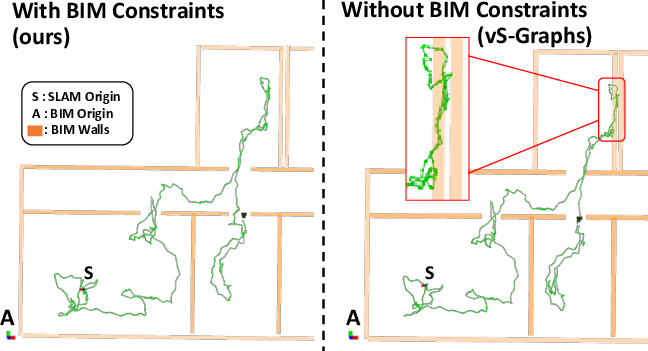
Figure 3: Qualitative comparison of estimated trajectories on the office1-1 sequence. Left: ivS-Graphs with BIM constraints; right: vS-Graphs baseline with only initial alignment.
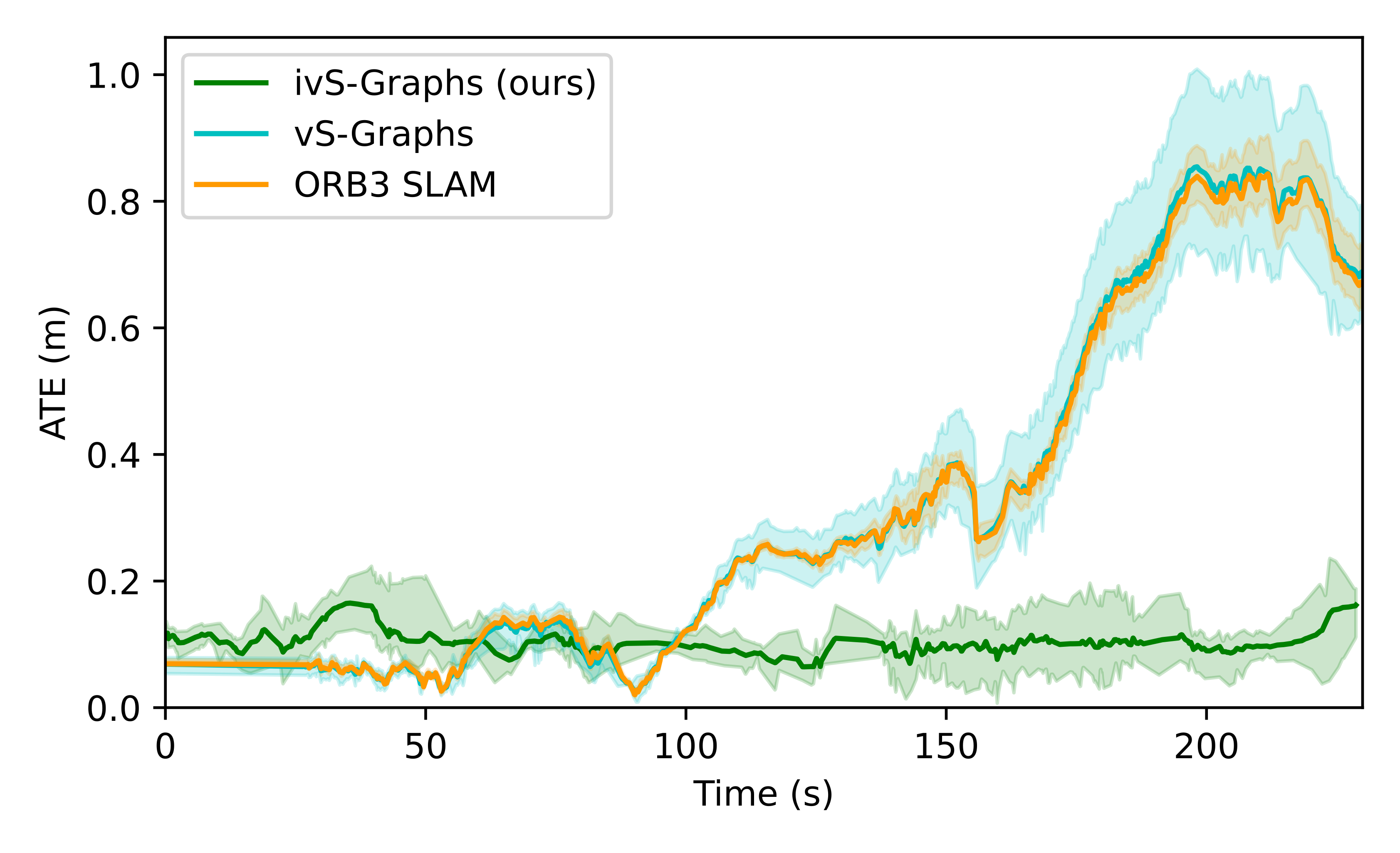
Figure 4: Accumulated trajectory drift error over time in office1-2, showing ATE for baselines and ivS-Graphs (BAD SLAM omitted due to tracking failures).
Robustness to Incomplete Environments
Simulated experiments with up to 30% of BIM walls missing demonstrate that ivS-Graphs maintains over 92% similarity in ATE to the nominal case, indicating robustness to partially built or evolving environments.
The system operates at an average of 23.3 FPS, with negligible overhead from BIM integration (baseline: 24.2 FPS). Initial alignment is achieved in under 0.25 ms, supporting real-time deployment on portable devices.
Technical Implications and Limitations
The results substantiate the claim that BIM-informed constraints can effectively regularize visual SLAM in challenging construction environments, particularly where geometric drift is exacerbated by repetitive or low-texture structures. The wall-centric approach is well-justified, as walls are stable, prevalent, and reliably detectable in most indoor construction scenarios.
However, the system's reliance on accurate wall detection and the initial specification of two BIM wall IDs may limit applicability in highly cluttered or ambiguous early-stage sites. The current formulation does not leverage other BIM elements (e.g., columns, floors, pipes), which could further enhance robustness and reduce the need for manual initialization. The approach assumes that the BIM is an accurate representation of the as-planned state; significant deviations or errors in the BIM could propagate into the SLAM solution.
Theoretical and Practical Impact
The integration of architectural priors into SLAM optimization bridges the gap between digital design and physical construction, enabling continuous, drift-bounded monitoring with commodity hardware. This has direct implications for AR-based progress tracking, automated deviation detection, and quality assurance workflows in construction. The factor graph formulation is extensible, allowing for the incorporation of additional semantic or geometric constraints as BIM standards evolve.
From a theoretical perspective, the work demonstrates the efficacy of tightly coupling structural priors with online SLAM optimization, rather than relying solely on global localization or post-hoc alignment. The confidence-weighted factor integration and robust kernel usage address the inherent uncertainty and partial observability in real-world construction sites.
Future Directions
Potential avenues for further research include:
- Multi-element BIM Integration: Incorporating additional BIM elements (floors, columns, MEP systems) to improve initialization and robustness in diverse environments.
- Learning-Based Wall Association: Employing deep geometric matching or graph neural networks to enhance wall association, especially under severe occlusion or partial observability.
- Automated Initialization: Reducing or eliminating the need for manual BIM wall ID specification via semantic scene understanding or active exploration strategies.
- Generalization to Other Domains: Extending the approach to other structured environments (e.g., industrial plants, hospitals) where digital twins or BIMs are available.
Conclusion
ivS-Graphs demonstrates that BIM-informed visual SLAM can deliver substantial improvements in trajectory and mapping accuracy for construction monitoring, with minimal computational overhead and strong robustness to incomplete environments. The system's architecture and empirical results provide a solid foundation for future research at the intersection of digital design, robotics, and real-time spatial perception. The approach is well-positioned to support the increasing demand for automated, reliable, and scalable construction monitoring solutions.