- The paper introduces D-LinOSS, which integrates learnable damping parameters to independently control energy dissipation across different timescales.
- It employs spectral analysis and an implicit-explicit discretization method to ensure stability while mapping system parameters to eigenvalues.
- Empirical results demonstrate that D-LinOSS outperforms previous models in classification, regression, and forecasting tasks across diverse datasets.
Damped Linear Oscillatory State-Space Models
This paper introduces Damped Linear Oscillatory State-Space Models (D-LinOSS), an enhancement to Linear Oscillatory State-Space Models (LinOSS), designed to improve the representation and learning of long-range dependencies in sequential data. The key innovation is the incorporation of learnable damping parameters, which allows the model to independently control the energy dissipation of latent states at different timescales. Through spectral analysis and empirical evaluations, the authors demonstrate that D-LinOSS overcomes the limitations of previous LinOSS models, achieving state-of-the-art performance across various sequence modeling tasks.
Background and Motivation
State-space models (SSMs) have emerged as a promising architecture for sequence modeling, offering advantages over traditional RNNs and Transformers in terms of computational efficiency and the ability to capture long-range dependencies. LinOSS models, built upon layers of discretized forced harmonic oscillators, have shown competitive performance in sequence learning tasks. However, LinOSS models suffer from a limitation: their energy dissipation mechanisms are rigidly coupled to the timescale of state evolution. This restricts the model's expressive power, as it cannot independently control damping at different frequencies. D-LinOSS addresses this limitation by introducing learnable damping parameters, which enable the model to learn a wider range of stable oscillatory dynamics. (Figure 1)
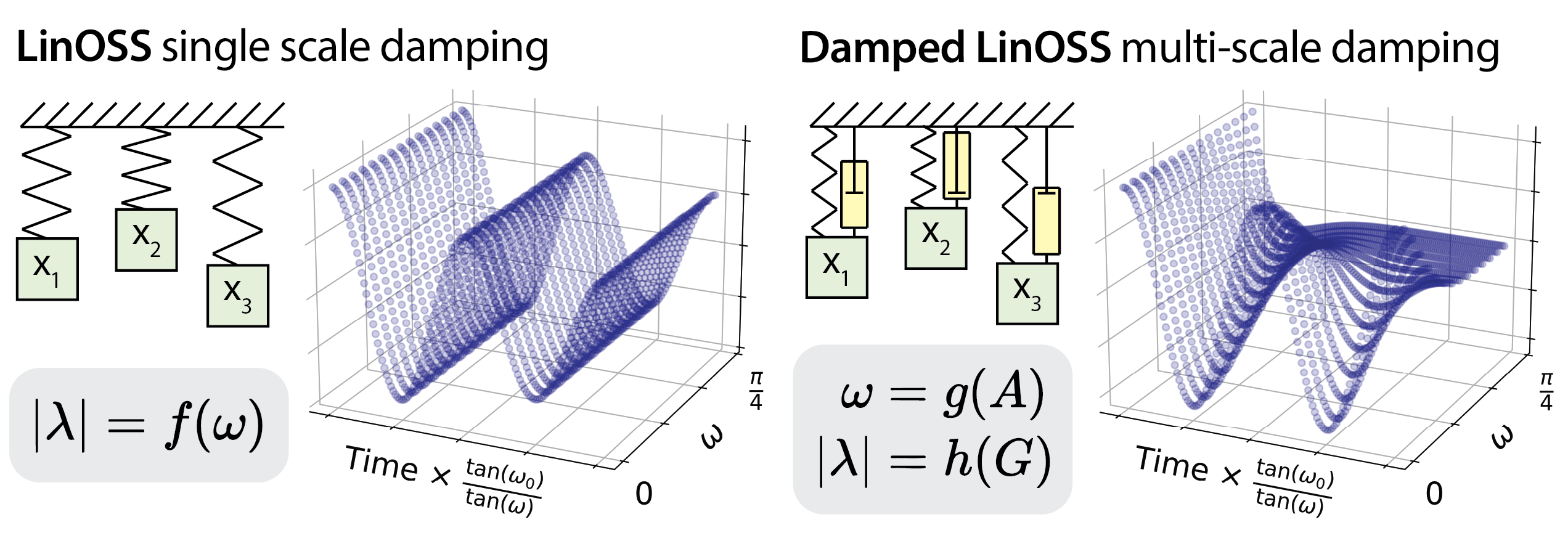
Figure 1: Previous LinOSS models couple frequency and magnitude of discretized eigenvalues, while D-LinOSS learns damping on all scales, expanding expressible internal dynamics.
D-LinOSS layers are constructed from a system of damped, forced harmonic oscillators, described by a second-order ODE system:
x′′(t)=−Ax(t)−Gx′(t)+Bu(t), y(t)=Cx(t)+Du(t)
where x(t) is the system state, u(t) is the input, y(t) is the output, A controls the oscillation frequency, and G defines the damping. Unlike previous LinOSS models where G=0, D-LinOSS learns G, providing more flexibility in controlling energy dissipation. To solve this ODE system, it's rewritten as an equivalent first-order system and discretized using an implicit-explicit (IMEX) method to maintain stability. This discretization introduces learnable timestep parameters, Δt, which govern the integration interval. The resulting discrete-time system is described by:
wk+1=Mwk+Fuk+1, yk+1=Hwk
where M, F, and H are the discrete-time counterparts of the system parameters. While general SSMs require diagonalization for efficient computation, D-LinOSS benefits from block diagonal matrices, obviating the need for explicit diagonalization.
Theoretical Analysis
Spectral analysis is employed to examine the stability and dynamical behavior of D-LinOSS. The eigenvalues of the recurrent matrix M govern how latent states evolve over time, with eigenvalues near unit norm retaining energy and those closer to zero dissipating energy. A key result is that D-LinOSS can represent all stable second-order systems, offering a broader range of expressible dynamics compared to previous LinOSS models.
The paper includes several propositions:
- Proposition 3.1: Provides the eigenvalues of the D-LinOSS recurrent matrix M in terms of A, G, and Δt.
- Proposition 3.2: Establishes a sufficient condition for system stability, ensuring that the eigenvalues are unit-bounded when Gi and Ai are non-negative and Δti∈(0,1].
- Proposition 3.3: Demonstrates that the mapping from model parameters to eigenvalues is bijective, implying that D-LinOSS can represent every stable, damped, decoupled second-order system.
These theoretical results confirm that D-LinOSS overcomes the limitations of previous LinOSS models, which exhibit a rigid relationship between oscillation frequency and damping, limiting their spectral range. The authors prove that the set of stable eigenvalues reachable in D-LinOSS is the full complex unit disk, whereas the set of LinOSS eigenvalues has zero measure in C.
Implementation Details
To ensure stability during training, the system matrices A and G are parameterized using ReLU and clamping functions. This guarantees that the oscillatory dynamics remain within the stable range. Additionally, the paper introduces a procedure to initialize the recurrent matrix M with eigenvalues uniformly sampled in the stable complex region. By leveraging the bijective relationship between model parameters and eigenvalues, the authors can control the spectral distribution of M.
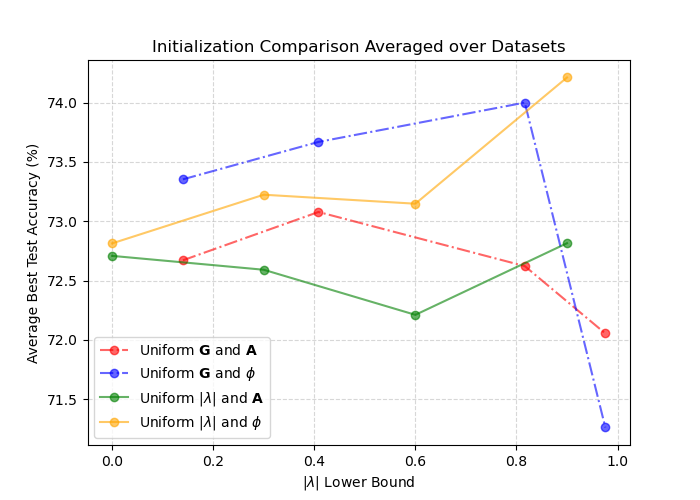
Figure 2: Initialization study shows intervals of eigenvalue magnitude and sampling methods.
Empirical Evaluation
The empirical performance of D-LinOSS is evaluated on a range of sequence learning tasks, including time-series classification (UEA datasets), time-series regression (PPG-DaLiA), and long-horizon time-series forecasting (weather prediction). The results demonstrate that D-LinOSS consistently outperforms state-of-the-art sequence models, including Transformer-based architectures, LSTM variants, and previous versions of LinOSS. On the UEA datasets, D-LinOSS achieves the highest average test accuracy, improving upon previous state-of-the-art results. Similarly, on the PPG-DaLiA dataset, D-LinOSS reduces the mean squared error compared to existing models. For weather forecasting, D-LinOSS achieves the lowest mean absolute error, showcasing its effectiveness as a general sequence-to-sequence model.
The paper contextualizes D-LinOSS within the broader landscape of SSMs and oscillatory neural networks. It acknowledges the foundational work on SSMs, including models based on FFT and HiPPO parameterizations. The paper also discusses the evolution of SSM architectures towards diagonal state matrices and associative parallel scans. Additionally, it highlights related models that incorporate oscillatory behavior, such as coupled oscillatory RNNs and graph-based oscillator networks.
Conclusion
D-LinOSS introduces learnable damping across all temporal scales, enabling the model to capture a wider range of stable dynamical systems. Empirical results demonstrate consistent performance gains across diverse sequence modeling tasks. The success of D-LinOSS in capturing long-range dependencies suggests that future research could explore selective variants of LinOSS, integrating the efficiency and expressiveness of LinOSS-type models with time-varying dynamics. The authors suggest that D-LinOSS will be crucial in advancing machine-learning-based approaches in domains grounded in the physical sciences because of its ability to represent temporal relationships with oscillatory structure.


