- The paper introduces a scalable design pattern that decouples tool management from agent reasoning to improve tool orchestration in AI systems.
- It outlines a control plane architecture using a standard API for multi-agent interaction and dynamic tool selection, enhancing system personalization and flexibility.
- The approach addresses challenges in governance, memory synchronization, and coordination, paving the way for robust real-world AI deployments.
The paper "Control Plane as a Tool: A Scalable Design Pattern for Agentic AI Systems" (2505.06817) presents a novel architectural design pattern aimed at improving tool orchestration in agentic AI systems. This pattern seeks to alleviate current challenges related to modularity, dynamic selection, and governance in such systems, focusing on enhancing scalability, safety, and extensibility.
Introduction to Agentic AI Systems
Agentic AI systems, powered by advanced LLMs like GPT-4, Claude, and Gemini, are redefining the landscape of autonomous intelligence. These systems move beyond static rule-based frameworks, offering modern capabilities such as emergent reasoning, multi-step planning, and adaptable tool usage. Core objectives of Agentic AI include autonomous decision-making and multi-tool integration, requiring sophisticated underlying infrastructure.
Despite advancements in orchestration frameworks like LangChain and CrewAI, production-grade systems face challenges regarding tool orchestration complexity, governance, memory synchronization, and coordination. These obstacles emphasize the need for robust architectural solutions that can handle dynamic environments.
The paper introduces the "Control Plane as a Tool" pattern, which decouples tool management from agent reasoning layers. This enhances flexibility and observability across agentic AI systems, allowing for seamless modification and personalized tool orchestration.
Design goals of the pattern include modularity, dynamic selection, governance, and framework portability. The internals of the control plane involve a standard API endpoint for agent interaction, route parsing, intent resolution, and feedback integration to enhance personalization. This design permits various orchestration strategies like semantic similarity and policy filters.
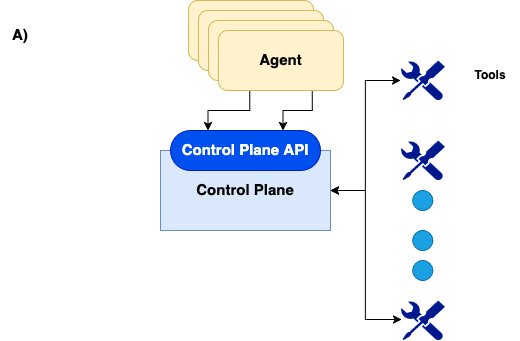
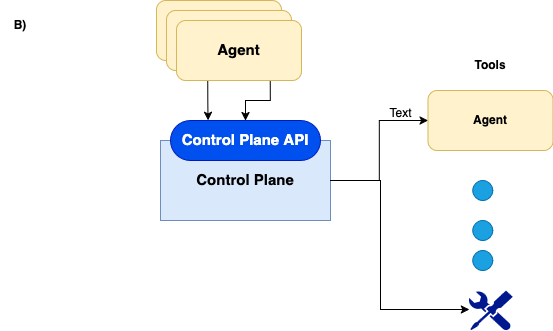
Figure 1: Agents-Tool Separation Through Control Plane
The architecture supports multi-agent interaction and external system integration, facilitating complex workflows and agent collaboration without extensive manual coding.
Comparison with Model Context Protocol
While similar in some respects to Anthropic's Model Context Protocol (MCP)—particularly in terms of tool registration and structured interfaces—the Control Plane diverges in its architectural approach and operational design.
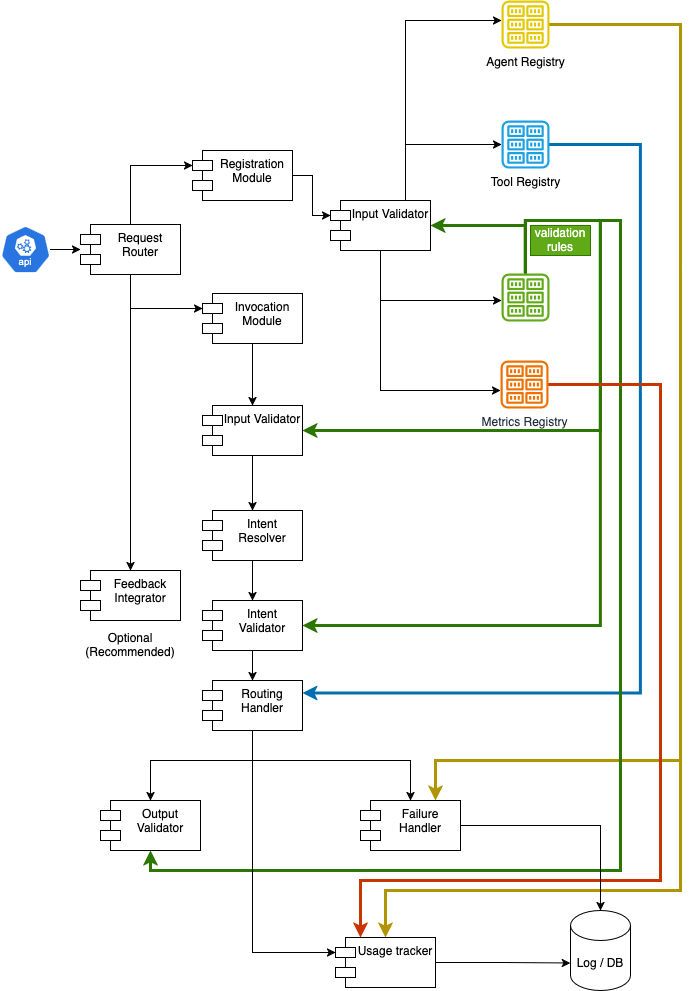
Figure 2: Control Plane Architecture
Key differences include the Control Plane's focus on orchestration, feedback, tool chaining, and extensibility across multiple agents, contrasting MCP's schema-based single-agent focus.
Conclusion and Future Directions
The proposed pattern represents a step forward in addressing tool orchestration in agentic AI systems. It emphasizes modularity, safety, and scalability, preparing the systems for real-world deployment. Moving forward, work will continue on refining framework-agnostic systems, exploring performance, and scaling multi-agent environments to leverage the full potential of AI-driven tool orchestration.