- The paper's main contribution is a distributed MILP-based scheduling system for coordinating autonomous vehicle arrivals across multiple intersections.
- It demonstrates that real-time V2I communication and localized optimization significantly reduce travel delays, stops, and fuel consumption.
- The MATLAB case study validates the method's effectiveness by outperforming traditional fixed-time signaling systems in traffic efficiency.
Multi-Intersection Traffic Management for Autonomous Vehicles
Introduction
The paper "Multi-Intersection Traffic Management for Autonomous Vehicles via Distributed Mixed Integer Linear Programming" (2007.06639) addresses traffic management in urban environments utilizing Connected and Autonomous Vehicles (CAVs). It proposes a scalable distributed approach using Mixed Integer Linear Programming (MILP) for optimal scheduling of autonomous vehicle arrivals across multiple intersections. The method builds upon previous work focusing on a single intersection, now applied to a grid, coordinating intersections for improved traffic flow and reduced fuel consumption, demonstrating the significance of vehicle-to-infrastructure (V2I) communication.
The proposed method involves assigning computational control nodes to each intersection within a grid. These nodes use MILP to optimally schedule vehicle arrivals based on real-time data received via connected vehicles. Each intersection communicates with neighboring intersections to coordinate traffic management. The approach aims to minimize intersection delays and travel times by synchronizing vehicle movements across a grid of intersections. The objective functions prioritize minimizing the difference between a vehicle's assigned and desired intersection access times while ensuring efficient passage through the grid (Figure 1).
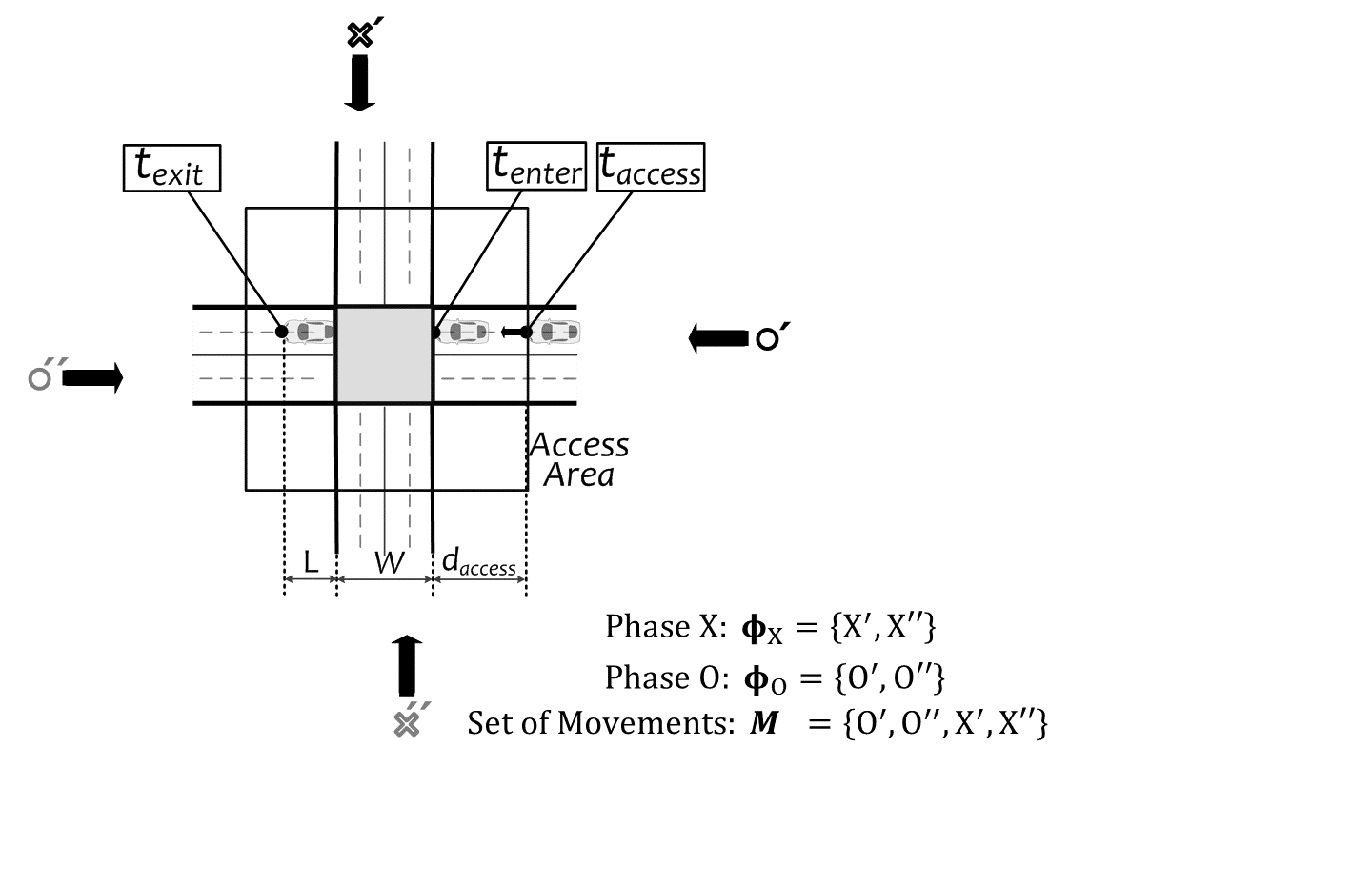
Figure 1: A schematic of phases and regions of the proposed intersection.
MILP-Based Control Mechanism
The MILP-based intersection controller establishes a mathematical model to maximize intersection throughput while maintaining safety and adherence to speed limits. It incorporates constraints such as speed and acceleration limits, safety gaps between vehicles on the same or conflicting movements, and calculates optimal arrival sequences to minimize delays. For example, the safety gap between vehicles on different movements is designed to prevent collisions by allocating sufficient headway based on vehicle speeds and intersection dimensions.
Distributed Optimization and Coordination
The paper's contribution in expanding MILP control to a grid of intersections involves a distributed optimization strategy where each intersection solves its optimization locally but shares results with adjacent intersections. This communication scheme ensures coherent traffic management across the grid, optimizing vehicle access times efficiently. The MILP formulation is iteratively solved in real-time, providing dynamic feedback to vehicles, thus promoting fluid traffic flow.
Case Study and Results
A case study with MATLAB simulations on a grid of intersections demonstrates the effectiveness of the proposed method. Vehicles are randomly injected into a simulated grid, and their trajectories are optimized using the MILP controller with coordination between intersections. Benchmarked against traditional fixed-time signaling and signal advisory systems, the MILP method reduces travel time, stop time, queue length, and improves fuel economy.
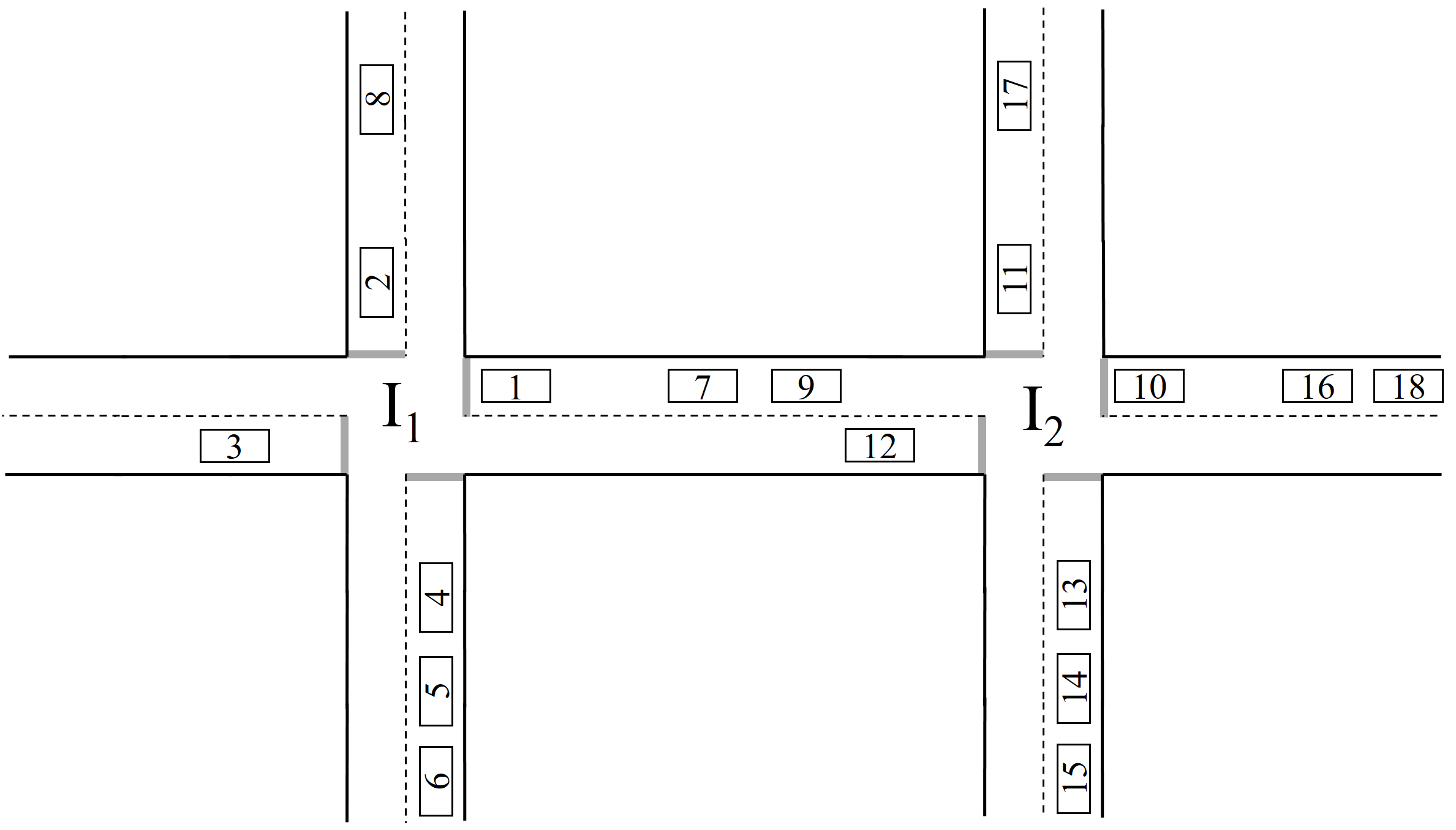
Figure 2: MATLAB case study schematic. Vehicles numbered from 1 to 9 subscribe to the first intersection (I1) and 10 to 18 subscribe to the second intersection (I2).
Benchmarking and Microsimulation
In further analyses, microsimulation environments reveal that coordinated MILP testbeds significantly enhance traffic efficiency compared to non-coordination and conventional signaling systems. The average vehicle velocity increases while maintaining lower acceleration and deceleration, which is crucial for fuel efficiency improvements. The coordinated MILP testbed shows remarkable improvement in fuel economy, emphasizing reduced acceleration/deceleration patterns. Figures presenting histograms of average velocities validate these observations (Figure 3).
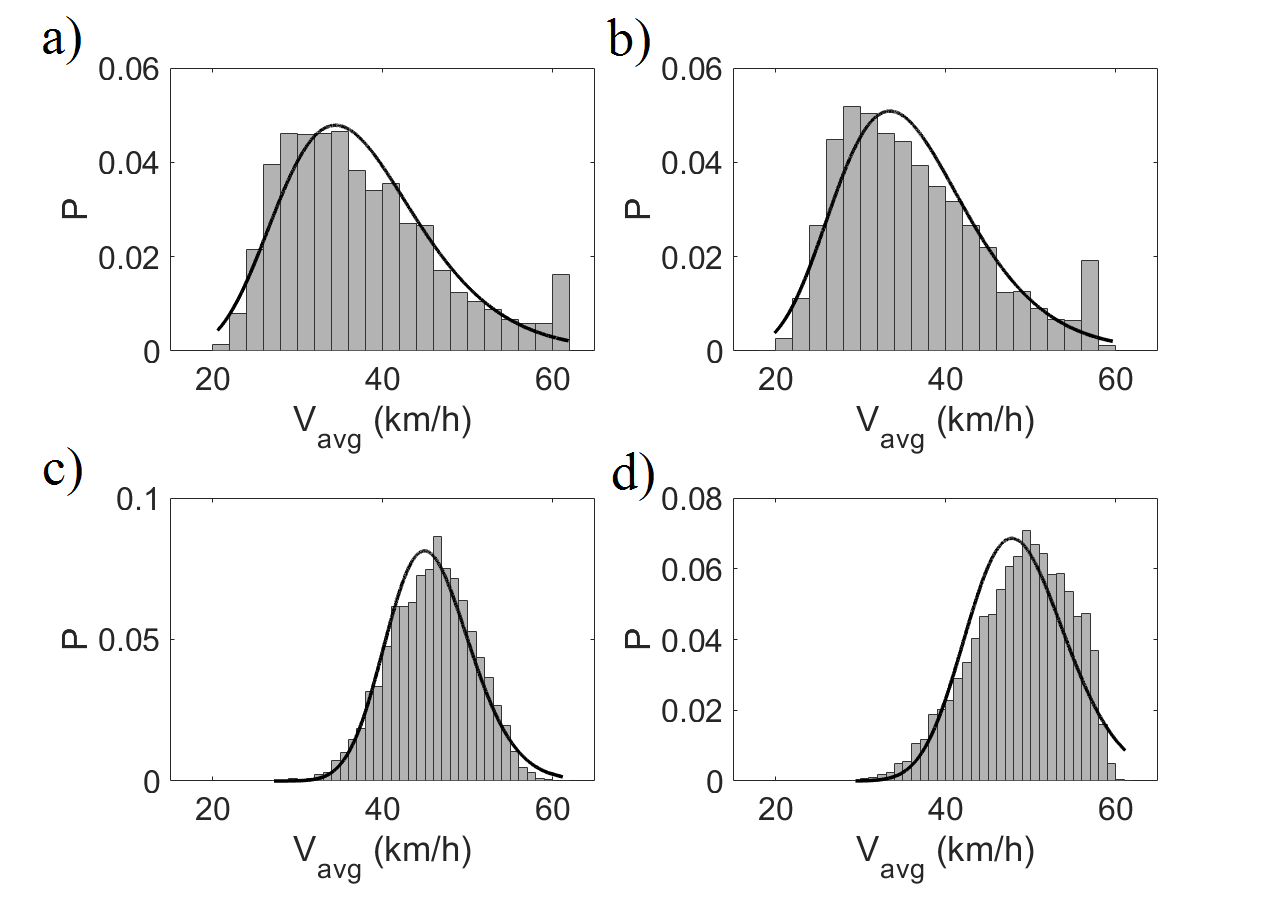
Figure 3: Histograms and lognormal fits of average velocity of vehicles in all four testbeds a) Testbed A, b) Testbed B, c) Testbed C, d) Coordinated MILP.
Conclusion
Distributed MILP control for multi-intersection traffic management offers substantial improvements in minimizing delays and enhancing fuel economy in urban settings. The coordination between intersection controllers ensures seamless transitions of vehicle groups through the grid, optimizing access times while reducing environmental impact. Future research could focus on integrating more complex intersection models, including turning maneuvers, and evaluating system performance in real-world implementations. The study underscores the potential of V2X technologies in revolutionizing city traffic management, creating a pathway toward more sustainable and efficient urban mobility solutions.