- The paper introduces MPrISM, a novel framework that employs minimax quadratic optimization for real-time collision risk assessment in ADS.
- It leverages high-dimensional control and planning strategies to measure safety through integrated vehicle and pedestrian kinematics.
- Empirical validation in simulated scenarios demonstrates its effectiveness in distinguishing aggressive maneuvers from conservative ones.
Model Predictive Instantaneous Safety Metric for Evaluation of Automated Driving Systems
Introduction
The paper "Model Predictive Instantaneous Safety Metric for Evaluation of Automated Driving Systems" (2005.09999) presents a novel approach to assess the safety of Automated Driving Systems (ADS). Acknowledging the limitations of conventional vehicle safety evaluation, the authors introduce the Model Predictive Instantaneous Safety Metric (MPrISM), which evaluates operational safety through real-time analysis of potential collision scenarios. This work emphasizes the need for comprehensive metrics that account for the dynamic interactions within high-dimensional, continuous multi-agent systems.
The foundational problem of ADS safety evaluation is explored within non-homogeneous differential-drive multi-agent systems. Vehicles and other agents within these systems execute complex maneuvers based on continuous-motion ordinary differential equations. To assess the safety of the Subject Vehicle (SV), the authors define collision conditions based on relative distance, adopting Euclidean norms. The SV is analyzed for its ability to mitigate collisions under standard assumptions, including fixed sensing-action cycles and partial non-cooperation among traffic agents.
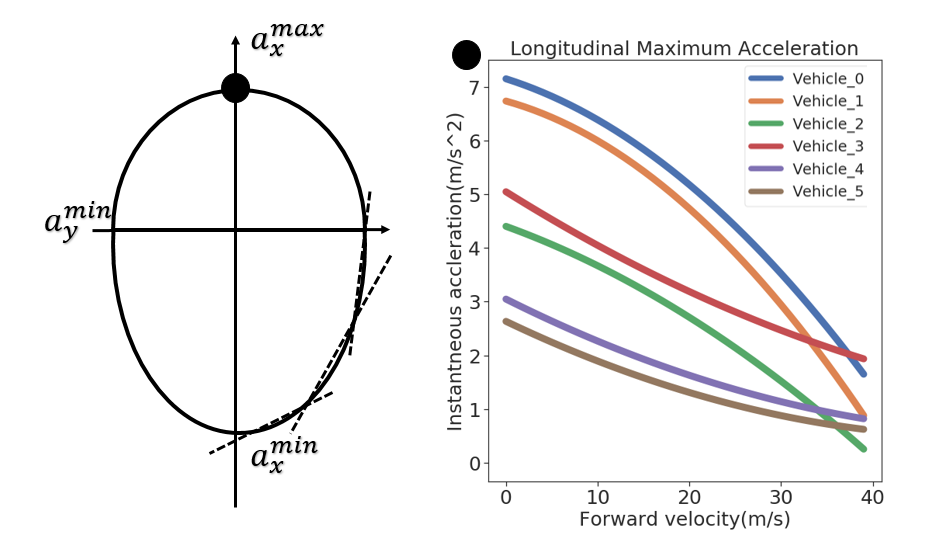
Figure 1: Approximating the admissible action space of vehicles with respect to the vehicle type and current speed. The black dot can be replaced by any of the values shown in the right subplot, given the vehicle type and the current speed.
Model Predictive Instantaneous Safety Metric
The MPrISM establishes a framework for calculating the Time-to-Collision (TTC) in real-time considering all potential maneuvers by the SV and surrounding agents. This is achieved through a series of minimax quadratic optimization problems subject to linear constraints. Such optimization evaluates the closest proximity to collision under worst-case scenarios, enabling an actionable safety status determination for the SV.
The novel aspect of this work lies in its ability to handle high-dimensional control and planning strategies, leveraging full actuation capabilities for safety evaluations. Unlike traditional TTC methods constrained to longitudinal dimensions, MPrISM provides a holistic view of safety in the operational domain.
Traffic Motion Kinematics
Detailed exploration of vehicle and pedestrian kinematics facilitates the implementation of MPrISM. Vehicle dynamics are approximated through linearized kinematics using constant velocity constructs, enabling efficient computation through Runge-Kutta methods. Furthermore, pedestrian movements are modeled using simplified Dubins-car-like frameworks, allowing integration into the safety metric computations seamlessly.
Scenario Analysis and Empirical Validation
The authors validate MPrISM through extensive empirically-driven scenario analysis, such as controlled environments and simulated tests in SUMO. Scenarios including "suddenly revealed stopped vehicle" and "emergent single lane change" highlight metric capabilities in assessing real-time safety under diverse conditions. MPrISM provides a quantitative measure distinguishing aggressive driving maneuvers from conservative ones, aligning computational predictions with intuitive driving safety assessments.
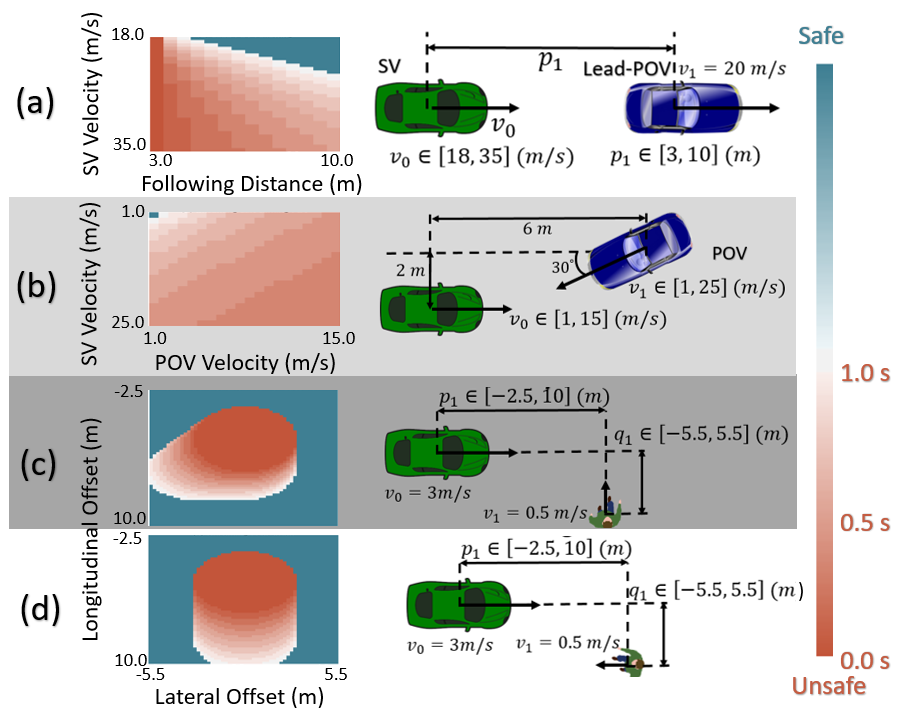
Figure 2: Various snapshots safety analysis: (a) The "Lead-POV Following" Snapshots, (b) The "Oncoming Left-turning POV" Snapshots, (c) The "Perpendicularly Passing Pedestrian" Snapshots, (d) The "Oncoming Pedestrian" Snapshots
Conclusion
The paper presents a robust approach to evaluate ADS safety through MPrISM, offering meaningful real-time feedback on vehicle operational safety status. It addresses fundamental challenges in high-dimensional driving environments, ensuring a comprehensive safety metric with potential practical applications. Future developments may include probabilistic extensions for risk assessments and broader control authority considerations to enhance predictive capabilities within more dynamic traffic scenarios.