- The paper introduces a modular and extensible library that streamlines parameterized terrain generation for simulation-driven AI model development.
- The paper employs a UNIX-like pipeline architecture combining noise- and function-based modules to create complex, reproducible terrains.
- The paper demonstrates effective integration with Blender for high-resolution rendering, enhancing simulation realism and terrain analysis.
Modular Terrain Generation Library
This paper introduces a modular and extensible library designed to facilitate parameterized terrain generation, primarily for simulation-driven development of intelligent machines. This Python-based library enables users to create complex terrains by combining simple modules, offering flexibility and ease of integration with rendering tools like Blender for a variety of applications, including synthetic data generation for ML models and ground truth development for perception tasks.
System Architecture
The library is built around a modular pipeline architecture reminiscent of UNIX command piping and ImageMagick operations. Terrains are represented as 2D heightmaps, operating through modules that produce terrain elements or transform existing ones. This setup allows intermediate results to be managed separately before composition into more complex terrains.
Figure 1: The library provides intuitive methods to generate terrain elements using noise or functions, as illustrated by Simplex noise applications which yield varied terrain characteristics.
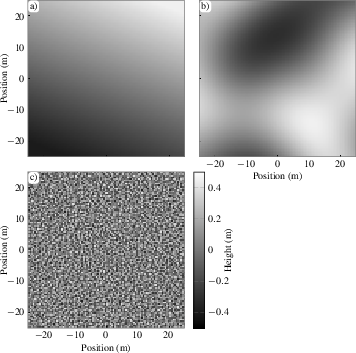
Figure 1: Plots of the default output from Basic terrain generation using Simplex noise.
Modules operate sequentially, taking input, producing output, and passing data to subsequent modules to enable complex transformations. The library features terrain modification, parametrization, and I/O capabilities, ensuring seamless scalability and reproducibility in pipelines.
Terrain Generation and Composition
The library supports both noise-based and function-based terrain generation:
- Noise-based Generation:
- Simplex Noise: Used in modules like Basic and Octaves, enabling multiscale terrain generation through adjustable amplitude scales.
- Function-based Generation:
- Predefined Functions: Modules like Gaussian, Plane, and Sphere produce deterministic terrain features controlled by defined parameters like position, height, and width.
Figure 2: Noise-based terrains can be combined using weighted sums to achieve desired features.
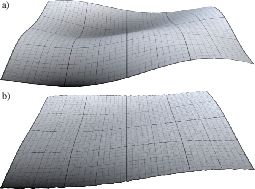
Figure 2: Two examples of weighted sums of terrain elements demonstrating varied landscape synthesis.
Combining modules apply operations like addition or maximum to merge multiple terrains into a single output. Users can apply scaling and clipping operations to modulate existing terrains to achieve specific spatial distributions or visual effects.
Parameterization Approach
Parameterization of terrains is accomplished by linking terrain generation characteristics to measurable properties such as slope and roughness.
- Slope Calculation:
- Utilizes gradient computation over terrain points with weights adjusted to target specific slope angles.
- Surface Roughness:
- Introduces proxy measures permitting users to derive roughness estimates based on desired terrain texture.
Figure 3: Illustrates the relationship between terrain roughness and generation parameters at varying persistence levels.
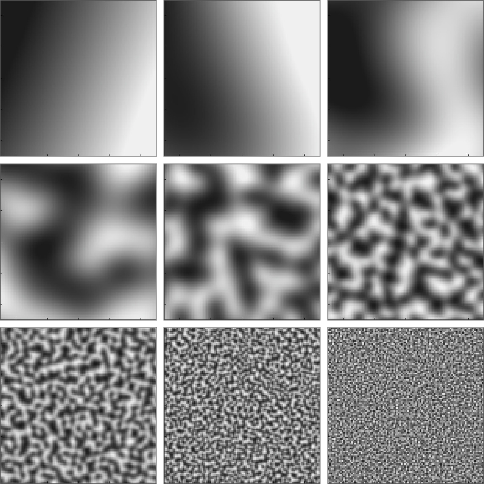
Figure 3: Roughness and Slope measures from varying persistence with added randomness.
The library offers a robust method for sampling and manipulating terrains to align with user-defined metrics, presenting graphical distributions and statistical analyses pertinent to the terrain attributes.
Integration and Application
The library integrates seamlessly with Blender for high-resolution rendering, accommodating mesh-object embedding and segmentation mask creation:
- Rendering Subsystem:
- Enables visualization of complex terrains using orthographic camera settings and custom color maps to enhance interpretability.
Figure 4: Demonstrates terrain visualization with embedded mesh-obstacles using Blender rendering.
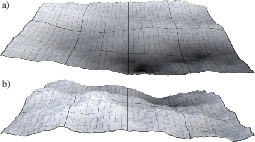
Figure 4: Render of terrain with embedded mesh rocks showcasing seamless integration with Blender.
Conclusion
The library provides a powerful tool for procedural terrain generation tailored to controlled environments necessary for AI and ML model development. It emphasizes extensibility and modular composition, ensuring broad applicability in simulation-driven research and industry applications.
The deployment of this library could accelerate terrain-driven advancements in AI through coherent and reproducible terrain synthesis. Future work involves expanding module diversity, integrating physics-based models, and establishing interactive interfaces to streamline user experience.
Ultimately, its design fosters adaptability, enabling researchers to obtain terrain characteristics specific to their needs, proving invaluable in domains requiring precise environmental simulation and terrain-feature analysis.