- The paper introduces UAHI, a hybrid framework that fuses machine learning with vehicle motion models using uncertainty quantification for precise sideslip angle estimation.
- It employs a modified Informer model alongside kinematic and Kalman filter-based models, achieving a 37% improvement in MAE compared to prior state-of-the-art methods.
- The study also releases the RevStED dataset, offering 5 hours of synchronized driving data to support future virtual sensor research.
Uncertainty-Aware Hybrid Machine Learning for Vehicle Sideslip Angle Estimation
This paper introduces an Uncertainty-Aware Hybrid Machine Learning (UAHI) architecture for virtual sensors designed to estimate the vehicle sideslip angle (VSA) using onboard sensor data. The UAHI architecture integrates a machine learning model with vehicle motion models (VMMs), incorporating uncertainty quantification for individual model estimates and hybrid fusion. This approach enables dynamic weighting of predictions from machine learning and vehicle motion models, leading to more accurate and reliable VSA estimates. The paper also introduces a novel dataset called RevStED, which includes synchronized measurements from advanced vehicle dynamic sensors.
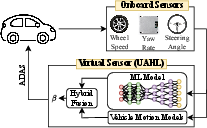
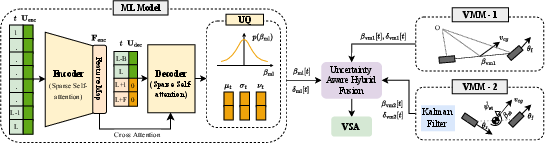
Figure 1: Overview of the proposed UAHI architecture for virtual VSA sensor.
Key Components of the UAHI Architecture
The UAHI architecture consists of three primary components: a machine learning model, vehicle motion models, and an uncertainty-aware hybrid fusion module.
Machine Learning Model
The machine learning component utilizes a modified Informer model, adapted for time series forecasting to estimate the VSA. The model is modified to exclude VSA history from the input and incorporates uncertainty estimation using a Student's t-distribution to model the VSA estimates. The final fully connected layer in the decoder predicts the mean, variance, and degrees of freedom of the underlying distribution, allowing for the computation of the posterior density for VSA.
Vehicle Motion Models
The VMMs incorporate vehicle dynamics knowledge to reduce errors in underrepresented scenarios. The paper employs two VMMs:
- VMM1: A kinematic model designed for flat vehicle movement, assuming negligible tire slip angles.
- VMM2: A model utilizing individual wheel speed data and a Kalman filter to estimate VSA, incorporating a linear single-track model for system representation.
Uncertainty Quantification in VMMs
The paper introduces a hypothesis for uncertainty estimation in VMMs based on the correlation between residuals of different state quantities. It posits that the uncertainty arising from model simplifications propagates to the residual vector, making individual residuals correlated. This hypothesis is empirically validated by demonstrating a strong correlation between yaw rate and VSA residuals.
Uncertainty-Aware Hybrid Fusion
The hybrid fusion module combines the outputs of the machine learning model and the VMMs, leveraging their complementary strengths. The paper proposes three fusion strategies:
RevStED Dataset
The paper introduces a novel dataset named RevStED to support research in virtual sensors. The dataset comprises 5 hours of driving data collected from a test vehicle equipped with advanced vehicle dynamic measurement sensors, including a GeneSys ADMA-G-PRO+ GNSS/Inertial System and a Kistler Correvit S-Motion sensor. The dataset includes a variety of driving maneuvers, such as slalom, constant-radius turns, and double-lane changes, and is divided into training, validation, and test sets based on scenario level.
Experimental Results and Analysis
The experimental results demonstrate the superior performance of the proposed UAHI architecture for VSA estimation. The UAHI models outperformed several baselines, including Dynamic Neural Networks, ANN-SSE, and RANN, as well as their individual components of machine learning and VMMs. The Deep Fusion approach achieved a 37% improvement in Mean Absolute Error (MAE) compared to the previous state-of-the-art RANN method. The UAHI architectures also exhibited low Maximum Error (ME), indicating their reliability in critical situations. The paper provides a conditional analysis of the results based on vehicle speed and lateral acceleration, demonstrating that the UAHI architecture enhances virtual sensor performance under both normal and challenging vehicle dynamic conditions.
Conclusion
The UAHI architecture enables the design of a virtual sensor to estimate VSA with high precision, relying only on onboard sensor data. The hybrid fusion strategies efficiently exploit the uncertainty-aware estimates from the VMMs and machine learning model to outperform state-of-the-art approaches in VSA estimation. The publication of the RevStED dataset supports future research in virtual sensors for vehicle state estimation. A potential limitation of the UAHI architecture is its current applicability to the test vehicle used in the dataset, and future work will focus on transfer learning to different vehicles.