- The paper introduces a novel 3D physical simulator achieving over 1000x speedup for rapid AI algorithm training.
- The paper details efficient collision detection using point clouds and optimized joint angle updates to balance realism and computational load.
- The paper demonstrates practical applications, including genetic programming for robot controller evolution, validating its robustness and performance.
NeoPhysIx: An Ultra-Fast 3D Physical Simulator for AI Algorithm Development
This paper introduces NeoPhysIx, a novel 3D physical simulator designed to accelerate the development and training of AI algorithms in physically-grounded domains. By employing innovative simulation paradigms and focusing on essential algorithmic elements, NeoPhysIx achieves speedups exceeding 1000x compared to real-time, enabling rapid testing and optimization of robot controllers and learning algorithms.
Core Principles of NeoPhysIx
The simulator prioritizes speed and stability by adopting several key computational principles. Unlike conventional physics engines that rely on force-based calculations, NeoPhysIx treats the robot as a single rigid body, directly computing relative movements between different segments. This simplification is valid under the assumptions of powerful motors and slow movements relative to the simulation timestep. The software is developed in Microsoft Visual C++ with 64-bit compilation and optimization flags and the graphical output relies on OpenGL. The same codebase also compiles on 64-bit Debian Linux, achieving comparable speed.
Collision Detection via Point Clouds
NeoPhysIx employs a point cloud collision detection method to minimize computational overhead. The robot model is represented by a set of mass points, which are used for calculating the center of gravity (CoG) and momentum. Collision detection is performed by checking the interaction between the robot's mass points and a predefined height map representing the environment. The x-y coordinates of each mass point are scaled and converted into integer indices, which are then used to look up the corresponding height value in a 2D array. This approach avoids the computational expense of triangle intersection calculations, resulting in a significant speedup.
Efficient Joint Angle Determination
To optimize performance, joint angle calculations are spaced over multiple timesteps. Instead of calculating new joint angles at each frame, NeoPhysIx updates them at larger intervals. Empirical tests suggest that updating joint angles every 80 ms provides a balance between realistic behavior and computational efficiency.
Friction Force Estimation as an Optimization Problem
NeoPhysIx models friction as the maximum static friction and formulates friction computation as an optimization problem. At each timestep, the algorithm minimizes the distance between a contact point at time t and the corresponding contact point at time t+1, accounting for both displacement and rotation of the robot. This optimization problem is then solved using a least squares approach, resulting in a system of linear equations that can be efficiently solved. This approach yields realistic friction behavior while minimizing computational cost.
Application Programming Interface (API)
NeoPhysIx provides a comprehensive and user-friendly API that simplifies the process of robot simulation. The API is built around the robot class, which encapsulates essential functions for robot construction and manipulation. Users can create various geometric shapes, such as mass points, boxes, cylinders, spheres, and rays, using dedicated function calls (Figure 1). The connectBodies() function allows users to assemble these basic bodies into more complex rigid structures, while the createJoint() function enables the creation of hinge joints between connected bodies.
(Figure 1)
Figure 1: The NeoPhysIx simulator offers a straightforward API for generating and connecting various body types.
Simplifying Body Shapes
The \lstinline{simplifyMode()} function further enhances simulation speed by allowing users to modify body shapes to simpler forms. For example, cylinders can be represented as boxes or even reduced to one or two points, significantly improving performance. The different simplification modes include:
- Mode 0: No simplification
- Mode 1: Convert cylinders and spheres to boxes
- Mode 2: Convert cylinders and spheres to two points
- Mode ≥ 3: Convert cylinders and spheres to a single point
Genetic Programming for Robot Controller Evolution
To demonstrate the capabilities of NeoPhysIx, the authors applied it to a Genetic Programming (GP) scenario, evolving a compact machine language program to control a six-legged walking robot (Figure 2). The fitness function was defined as "Walk as far as possible." The machine code interpreter commands used in the GP are summarized in Table 1.
(Figure 2)
Figure 2: A screenshot of the simulated robot, equipped with foot contact sensors and 18 degrees of freedom.
The evolutionary algorithm uses mutation as its sole variation operator. Each individual is evaluated by simulating two minutes of robot activity in NeoPhysIx. Each generation, the best 50 of 100 individuals are selected, duplicated, and mutated to form the next generation, followed by a new evaluation period.
The simulation, conducted on a single thread of an Intel i5 processor operating at 2.4 GHz, demonstrated remarkable stability. Simulating two minutes of robot lifetime across 100 robots for 1,364 generations took approximately nine hours, representing over half a year of simulated robot lifespan. The learning curve (Figure 3) illustrates the evolution of performance over generations.
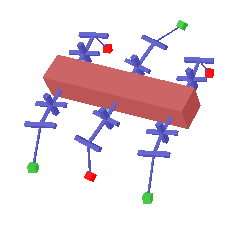
Figure 3: The graph shows the best fitness, which is the longest walking distance, of all robots in their generation.
The optimization process resulted in the emergence of an unconventional sideways walking gait, showcasing the algorithm's ability to discover novel solutions. No memory leaks were observed during the nine-hour runtime, confirming the robustness of the implementation.
Conclusion
NeoPhysIx offers a unique platform for advancing research in robot learning, evolution, planning, and controller testing. The simulator's simplified yet robust simulation principles, combined with its user-friendly API and efficient computational methods, enable rapid prototyping and optimization of robotic systems.
Future Directions
Future work will focus on refining the friction model, incorporating robot-robot collision simulation, and expanding sensor capabilities with camera sensors. The development of a Python wrapper will further enhance accessibility and integration with existing AI ecosystems. The authors also plan to integrate state-of-the-art evolutionary and neural algorithms to fully realize the simulator's potential for exploring cutting-edge control strategies.