- The paper proposes a stochastic control framework that combines Newell's car-following model with Bayesian linear regression to predict human driving behavior.
- The study employs a dynamic replanning mechanism and probabilistic safety constraints to optimize CAV trajectories amid the uncertainties of mixed traffic.
- Simulation results using PTV-VISSIM demonstrate significant improvements in travel time and traffic flow at varying CAV penetration rates.
Stochastic Time-Optimal Trajectory Planning for CAVs in Mixed-Traffic Merging Scenarios
Introduction
The paper "Stochastic Time-Optimal Trajectory Planning for Connected and Automated Vehicles in Mixed-Traffic Merging Scenarios" (2311.00126) addresses the complex problem of coordinating Connected and Automated Vehicles (CAVs) in environments where they must interact with Human-Driven Vehicles (HDVs), particularly in road merging scenarios. Leveraging Newell's car-following model integrated with Bayesian linear regression (BLR), the authors propose a framework that dynamically predicts human driving behavior and formulates a stochastic control problem to optimize CAV trajectories under uncertainty.
Proposed Framework
The core contribution of the paper is a stochastic time-optimal control framework for trajectory planning. In this model, predictions about HDV behavior are generated in real-time using a data-driven approach based on Newell's car-following model. The framework incorporates a Bayesian linear regression method to learn the time shift parameter, which is crucial for predicting HDV trajectories accurately. A unique aspect is the integration of a replanning mechanism that updates CAV trajectories when significant deviations in human driving behavior are detected.
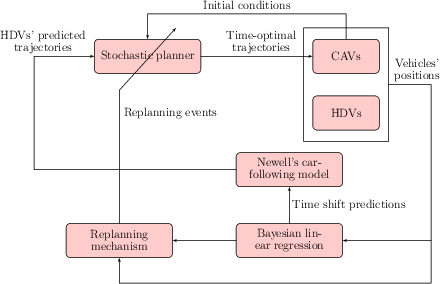
Figure 1: A diagram illustrating the proposed framework.
Methodology
The proposed methodology involves formulating a stochastic time-optimal control problem that accounts for state, input, and safety constraints through probabilistic lateral and rear-end constraints. These constraints utilize confidence intervals derived from the BLR models to ensure robustness against the inherent variability in HDV behavior.
The control strategy is adaptive; it includes a replanning mechanism that checks prediction accuracy and updates CAV trajectories accordingly. This mechanism is particularly crucial for maintaining safety and efficiency as HDVs exhibit uncertain behaviors not accounted for in static models.
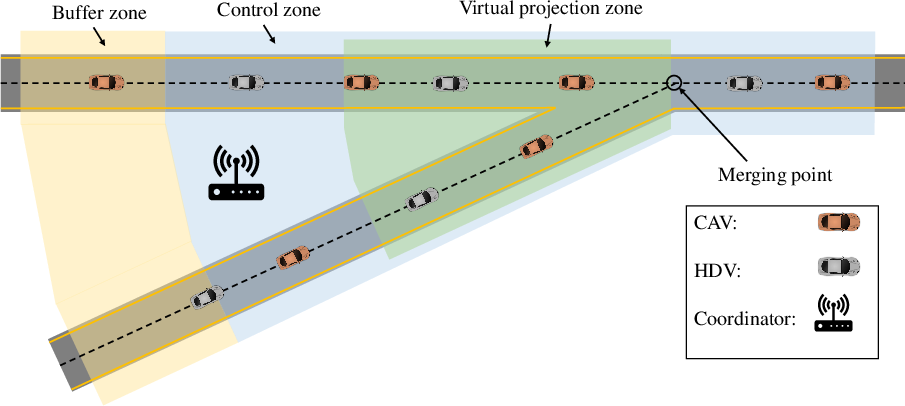
Figure 2: A merging scenario with two roadways intersecting at a merging point. The control zone and buffer zone are represented by the blue and yellow areas, respectively. In the virtual projection zone (green area), virtual projection is utilized.
Simulation and Results
Simulations conducted using the PTV-VISSIM software demonstrate the effectiveness of the framework. Under various traffic volumes and CAV penetration rates, the results showed significant improvements in travel time and traffic flow when CAVs are coordinated using the proposed method. Higher CAV penetration rates led to more notable improvements, emphasizing the framework's efficacy under increased automation levels.
The simulation results also highlight the robustness of the proposed technique in scenarios with mixed-traffic dynamics, showing that CAVs can safely navigate complex interactions with HDVs while optimizing their trajectories for time efficiency.
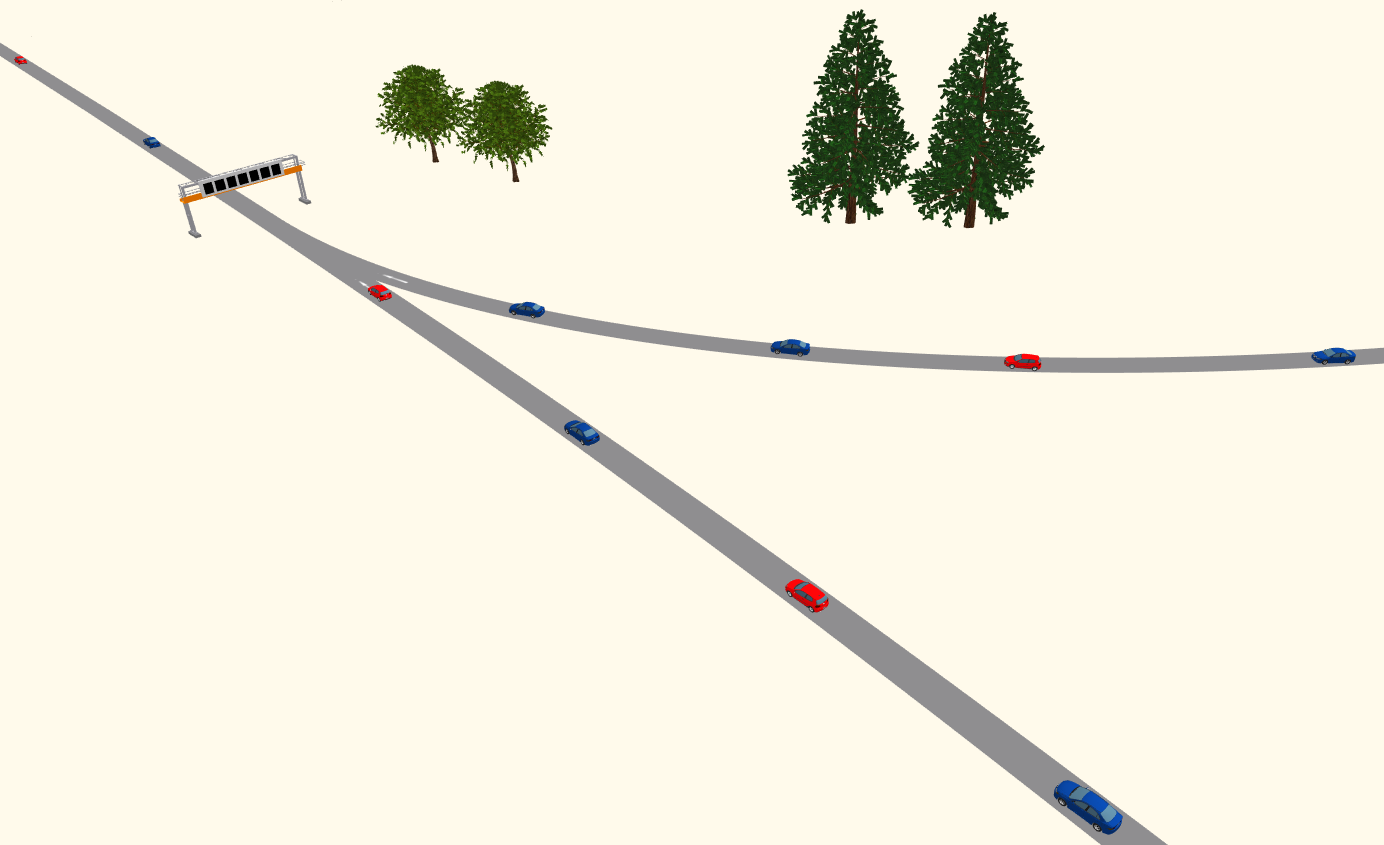
Figure 3: The simulation environment in PTV\textendash VISSIM.
Implications and Future Work
The research highlights the importance of considering human behavior unpredictability in CAV trajectory planning. By integrating stochastic models that learn and adapt over time, the proposed framework enhances both safety and efficiency in mixed-traffic scenarios. The potential for real-world application is significant, with future work suggested in more complex scenarios such as multi-lane and intersection environments.
Conclusion
The paper provides a comprehensive solution for stochastic trajectory planning in mixed-traffic scenarios, underscoring the necessity of adaptive control systems that account for human driver variability. The integration of BLR for online learning and the innovative replanning mechanism represent significant steps forward in CAV deployment strategies, with the potential to improve traffic conditions significantly as vehicle automation progresses.