Critic-Guided Planning with Retrieval-Augmentation: Enhancing LLM Performance on Challenging Tasks
The paper "Can We Further Elicit Reasoning in LLMs? Critic-Guided Planning with Retrieval-Augmentation for Solving Challenging Tasks" introduces a novel framework termed CR-Planner. This framework aims to address challenges faced by LLMs in tasks that require complex reasoning and domain-specific knowledge. The proposed approach leverages fine-tuned critic models to guide both reasoning and retrieval processes, thereby enhancing the problem-solving capabilities of LLMs.
Objectives and Methods
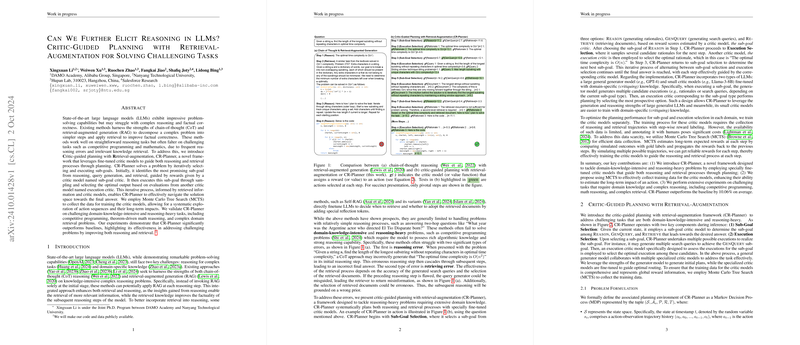
The fundamental objective of the paper is to improve the performance of LLMs on tasks that are both reasoning-intensive and require domain-specific knowledge. Traditional methods utilizing chain-of-thought (CoT) and retrieval-augmented generation (RAG) often struggle with complex tasks due to frequent reasoning errors and irrelevant knowledge retrieval. To overcome these limitations, CR-Planner introduces a structured approach that integrates critic-guided planning with Monte Carlo Tree Search (MCTS) for training data collection.
CR-Planner operates through an iterative process of selecting and executing sub-goals, guided by critic models. The main components of this process are:
- Sub-Goal Selection: At each step, the framework identifies the most promising sub-goal (reasoning, query generation, or retrieval) based on rewards provided by a critic model.
- Execution Selection: For the chosen sub-goal, multiple candidate executions are generated and evaluated by another critic model to select the optimal output.
- Monte Carlo Tree Search (MCTS): This is employed to systematically explore action sequences and their long-term impacts, facilitating the training of critic models.
Experimental Validation
The effectiveness of CR-Planner was validated on three challenging tasks: competitive programming, theorem-driven math reasoning, and complex domain retrieval problems.
- Competitive Programming (USACO Benchmark):
- CR-Planner achieved a 7.49% improvement over baseline methods and demonstrated significant gains at higher difficulty levels.
- The framework's ability to guide both reasoning and retrieval through critic models was particularly beneficial for solving complex algorithmic tasks.
- Theorem-Driven Math Problems (TheoremQA-Math):
- CR-Planner outperformed other methods by 13.59% in accuracy, showcasing its efficacy in addressing reasoning-heavy math problems where accurate retrieval of relevant knowledge is crucial.
- Reasoning-Heavy Domain Retrieval (StackBio and StackEcon):
- The framework improved performance metrics (nDCG@10) by 10.31% for StackBio and 7.9% for StackEcon, highlighting its advantage in tasks that require in-depth domain-specific retrieval.
Implications and Future Research
The experimental results indicate that CR-Planner effectively enhances the problem-solving capabilities of LLMs on tasks that involve both intricate reasoning and the need for specific domain knowledge. By incorporating critic models trained via MCTS, the system benefits from more guided reasoning and accurate retrieval processes.
From a practical standpoint, this approach can be applied to a wide range of complex tasks, potentially improving the reliability and efficiency of LLMs in fields such as competitive programming, mathematical problem solving, and specialized domain queries in professional and academic settings.
Future Developments
The CR-Planner framework opens several avenues for future research. One promising direction is to explore the integration of more advanced retrieval systems and further refinement of the critic models to handle even larger and more complex datasets. Another potential development is the application of CR-Planner to other domains such as legal reasoning, medical diagnostics, and financial analysis, where the combination of deep reasoning and domain-specific knowledge retrieval is critically important.
Moreover, the flexibility of CR-Planner to work with various LLMs, including both open-source and proprietary models, suggests that future iterations could further enhance the generalizability and scalability of the framework. Additionally, investigating the impact of critic model fine-tuning on different base models and optimizing the balance between performance improvements and computational costs will be crucial for practical implementations.
By systematically addressing the challenges of complex reasoning and accurate knowledge retrieval, CR-Planner stands as a significant step towards more capable and reliable artificial intelligence systems.