- The paper presents VectorNet, a model that encodes HD maps and agent trajectories using hierarchical graph neural networks to enhance prediction accuracy.
- It leverages polyline subgraphs for local feature extraction and self-attention for global context, significantly reducing computational costs and model parameters.
- Experimental results on the Argoverse dataset show that VectorNet achieves lower Average Displacement Error and outperforms traditional ConvNet approaches.
VectorNet: Encoding HD Maps and Agent Dynamics from Vectorized Representation
Introduction
The paper "VectorNet: Encoding HD Maps and Agent Dynamics from Vectorized Representation" (2005.04259) focuses on behavior prediction in dynamic, multi-agent systems, particularly self-driving vehicles. It introduces the VectorNet model, which leverages a hierarchical graph neural network to predict vehicle trajectories by integrating agent dynamics with HD map context. Unlike previous methods that use rasterized images and ConvNets, VectorNet operates directly on vectorized representations of map and trajectory data, enhancing computational efficiency without sacrificing prediction performance.
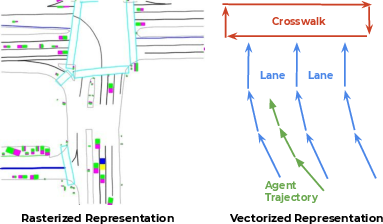
Figure 1: Illustration of the rasterized rendering (left) and vectorized approach (right) to represent high-definition map and agent trajectories.
Methodology
VectorNet utilizes a hierarchical graph neural network for encoding structured HD maps and agent trajectories. The vectorized representation captures spatial and semantic locality, treating vectors as graph nodes with features comprising start and end coordinates, semantic labels, and polyline group identifiers. A polyline subgraph aggregates features locally before passing them to a global interaction graph.
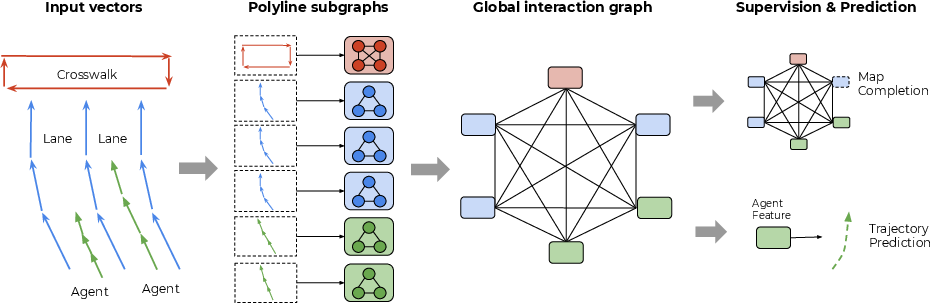
Figure 2: An overview of our proposed VectorNet. Observed agent trajectories and map features are represented as sequences of vectors, which are passed to a local graph network for polyline-level feature extraction.
Key to VectorNet’s success is its hierarchical architecture, where local context is modeled within subgraphs, and global context is captured through self-attention networks. Additionally, a self-supervised auxiliary task of node feature completion enhances the model's ability to infer interactions among entities by reconstructing masked node features based on surrounding context.
Experimental Results
Evaluations were conducted on an in-house behavior prediction benchmark and the Argoverse dataset, demonstrating VectorNet’s competitive performance. VectorNet achieved comparable or superior results compared to baseline ConvNet approaches, reducing computational costs by an order of magnitude and saving over 70% in model parameters while outperforming state-of-the-art methods on Argoverse.
The paper reported significant improvements in Average Displacement Error (ADE) and Displacement Error at varying prediction horizons (DE@n), indicating the model's proficiency in long-term trajectory forecasting. These results underscore VectorNet's robust prediction capabilities and computational efficiency.
Implications and Future Work
VectorNet's approach to encoding vectorized map and trajectory data establishes a promising direction for behavior prediction models, particularly in autonomous driving contexts. Its reduced computational footprint and superior performance make it a feasible option for real-time applications.
The paper hints at potential integrations with multimodal trajectory decoders to extend VectorNet's capabilities in generating diverse future trajectories. Future research might explore these integrations as well as enhancements in vector representation to accommodate even more complex road entity interactions.
Conclusion
The VectorNet model represents a substantial advance in behavior prediction systems, capable of encoding complex map and agent dynamics efficiently through vectorized representations and hierarchical graph architectures. Its application to self-driving vehicles not only advances state-of-the-art trajectory prediction but also paves the way for further innovation in multi-agent system behaviors.
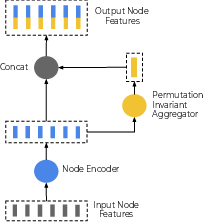
Figure 3: The computation flow on the vector nodes of the same polyline.