- The paper's main contribution is a conservative trajectory optimization framework that integrates local exploration for safe MAV navigation in cluttered unknown spaces.
- It employs polynomial spline representation and ESDF/TSDF mapping to generate smooth, collision-free trajectories in dynamic and unstructured environments.
- Extensive simulations and real-world tests demonstrate superior goal-reaching performance and computational efficiency in challenging, forested terrains.
Summary of "Safe Local Exploration for Replanning in Cluttered Unknown Environments for Micro-Aerial Vehicles"
Introduction and Problem Statement
The paper "Safe Local Exploration for Replanning in Cluttered Unknown Environments for Micro-Aerial Vehicles" presents a novel approach focusing on safe navigation for Micro-Aerial Vehicles (MAVs) in dynamically cluttered and unknown environments. The central challenge addressed is the capability of MAVs to explore unstructured terrains, such as dense forests, without prior maps while ensuring collision-free, optimal paths. The approach integrates conservative trajectory optimization with local exploration strategies to address local minima challenges and guarantee safe navigation.
Core Methodology
A conservative trajectory optimization-based local planner forms the backbone of the proposed system. The method leverages a polynomial spline representation for MAV trajectories, optimizing for derivatives of position, including jerk and snap, which ensures feasible and smooth flight paths. The optimization problem is further enhanced to handle local minima via exploration strategies. Unlike existing frameworks that rely on optimistic global planners treating unknown space as free, this paper employs a conservative planner treating unknown space as occupied, enhancing safety in cluttered environments.
To address map representation issues, the paper utilizes incrementally-built Euclidean Signed Distance Fields (ESDFs) derived from Truncated Signed Distance Fields (TSDFs), facilitating real-time updates and handling unknown space conservatively. This is critical for navigating environments like forests where assumptions about free space could lead to unsafe paths.
When local planners encounter obstacles or local minima, intermediate goal selection is crucial. The paper conceptualizes exploration strategies to complement planning algorithms, maximizing exploration gain to guide MAVs toward the final goal efficiently. The proposed method evaluates multiple goal-selection strategies, such as naive random selection, optimistic and conservative Rapidly-exploring Random Trees (RRT*), and next-best-view planner (NBVP), comparing their effectiveness.
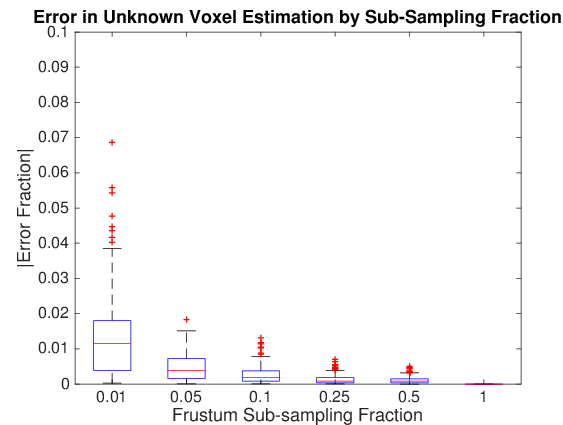
Figure 1: Error in estimation of unknown voxels in the sensor frustum (as a proxy for exploration gain).
Simulation and Experimental Results
Through extensive simulations, the approach demonstrates superior performance in goal-reaching abilities across various clutter densities compared to traditional optimistic planners. Importantly, the method leverages exploration-based intermediate goal selection to enhance reactivity and adaptability, even in complex environments. Experimental validation includes real-world scenarios in forested areas, demonstrating successful navigation while maintaining computational efficiency and real-time processing onboard MAVs.
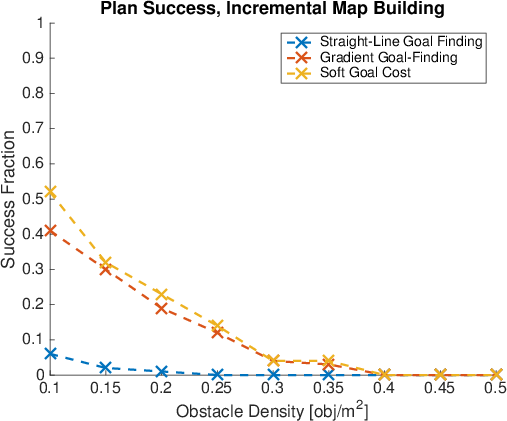
Figure 2: A comparison of the planner success without any intermediate goal-finding strategy, building the map incrementally.
Practical Implications and Future Work
The proposed system paves the way for safer and more autonomous operations of MAVs in environments traditionally challenging due to unpredictability and sensor limitations. Potential applications extend to search and rescue missions, environmental monitoring, and humanitarian operations where human navigation is difficult or hazardous. Future work could explore integrating multi-sensor data for enhanced perception and further optimization of real-time trajectory planning to accommodate more complex dynamics and larger operational areas.
In conclusion, by combining conservative local planning with an active exploration strategy, the research addresses key challenges in MAV navigation within unknown dense environments, promising significant advancements in autonomous navigation systems for aerial robotics.