- The paper maps minimal neural dynamics to embodied agent behaviors using the Haken-Kelso-Bunz oscillator model.
- Simulations demonstrate that balancing internal oscillator coupling with sensory and social inputs optimizes consensus performance.
- The study pioneers integrating enactive cognition into multi-agent systems, offering new pathways for sophisticated collective decision making.
Collective Decision Making by Embodied Neural Agents
This essay provides a comprehensive analysis of the paper "Collective Decision Making by Embodied Neural Agents" (2411.18498). The paper explores the neural dynamics underlying collective decision-making processes in multi-agent systems. These agents are embedded with an oscillatory model projected onto embodied agents in environments with stimulus gradients.
Neural Dynamics and Agent Architecture
The core contribution of the paper is the mapping of minimal neural dynamics to agent behaviors by leveraging the Haken-Kelso-Bunz (HKB) oscillator model. The agents are equipped with a minimal architecture featuring sensory and motor oscillators that facilitate sensorimotor coordination steering collective behavior (Figure 1). Initial simulations demonstrate dependency on the internal oscillator coupling and external sensory input for realizing adaptive agent behaviors.
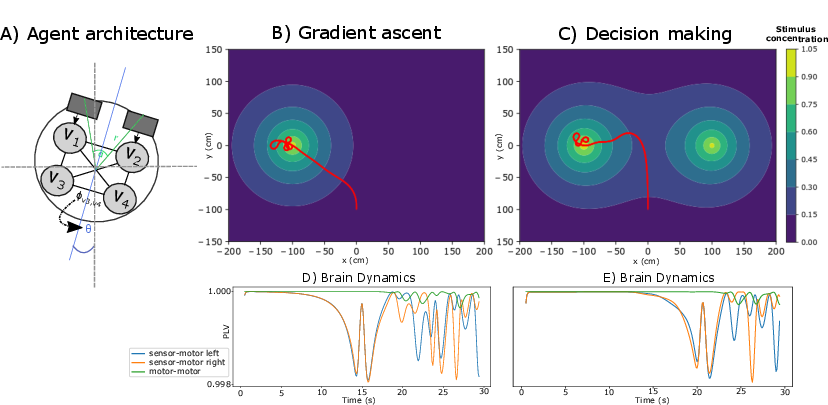
Figure 1: Single-agent behavior and neural dynamics. (A) The agent architecture: two sensory oscillators (nodes 1 and 2) and two motor oscillators (nodes 3 and 4).
The model extends the traditional Braitenberg vehicle with an enactive cognition framework to simulate biological-like intraneural coordination. This integration allows the agents to demonstrate behaviors akin to reducing phase-locking value (PLV) under certain parameter regimes conducive to task performance, which in this case is moving towards a stimulus source.
Multi-agent Simulations and Collective Dynamics
Expanding from single-agent behavior, the study investigates how agents with differing initial states and parameters react in environments featuring dual stimulus sources. Consensus-building in collective decision-making scenarios is facilitated by intra-agent, inter-agent, and agent-environment couplings.
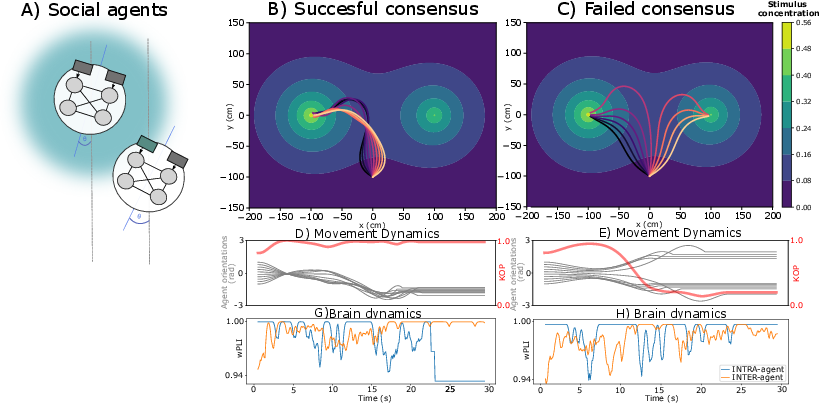
Figure 2: Agent behavior and intra-agent neural dynamics during collective decision making.
Simulation outcomes illustrate that a meticulous balance between environmental influences, social sensitivity, and internal oscillator coupling maximizes consensus performance. Disruptions in this balance can lead to convergence failure despite aligned inter-agent movements. Notably, overly strong social influences without sufficient internal coupling yield paradoxical outcomes, reducing task performance despite high movement alignment.
Implications and Future Directions
This research emphasizes the importance of integrating neural oscillator models into multi-agent systems for sophisticated behaviors driven by intra- and inter-agent dynamics. The capacity for the system dynamics to negotiate between internal and external stimuli has potential implications for enhancing AI embodiment strategies.
The findings propose a departure from simplistic modeling for multi-agent consensus strategies, projecting a biological plausibility not traditionally embraced in such computational paradigms. Future explorations can extend this work to multi-source environments and test robustness under variable initial conditions and noise influences.
Conclusion
The integration of neural dynamics into embodied agents elucidates underlying coordination mechanisms pivotal for consensual decision-making in distributed systems. This paper enriches Social NeuroAI research by bridging adaptive cognitive processing with measureable collective behaviors in multi-agent settings. The insights gleaned suggest tangible pathways for advancing agent interaction within dynamic environments, extending possibilities for both human- and AI-centric collective task executions.