Low Frequency Sampling in Model Predictive Path Integral Control
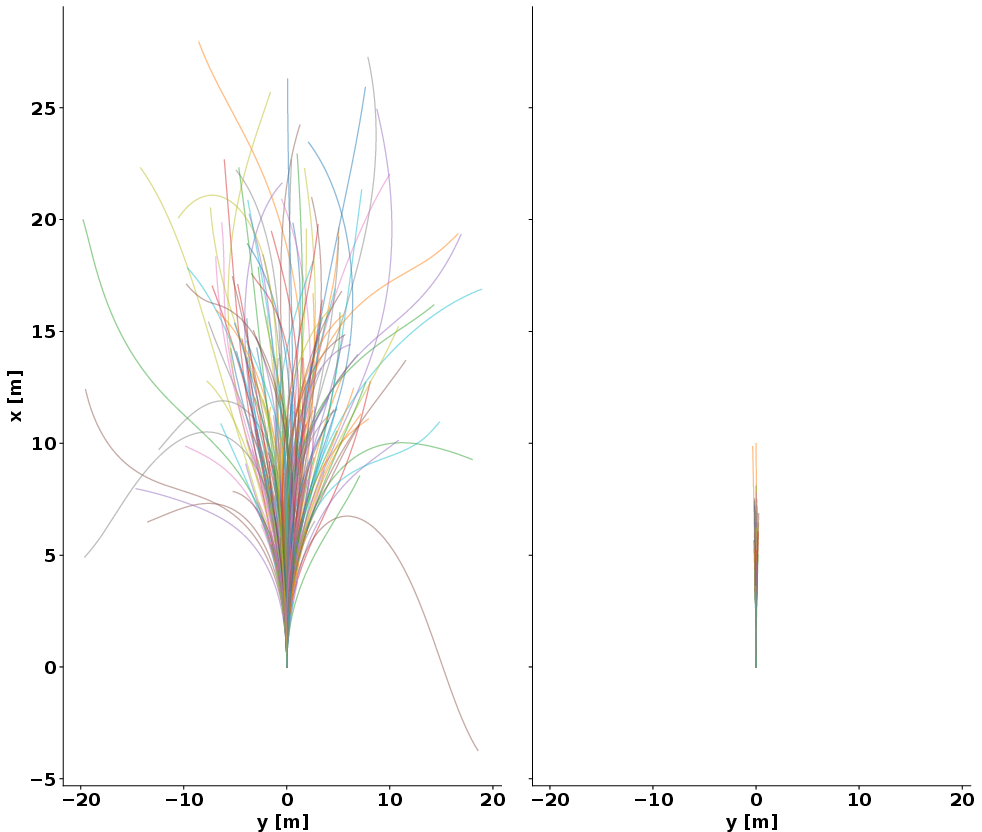
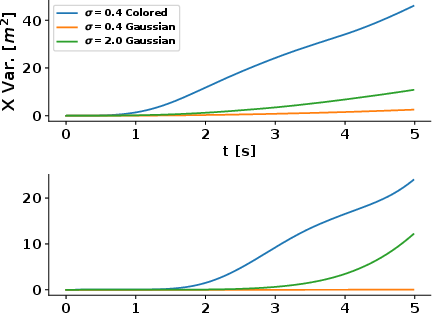
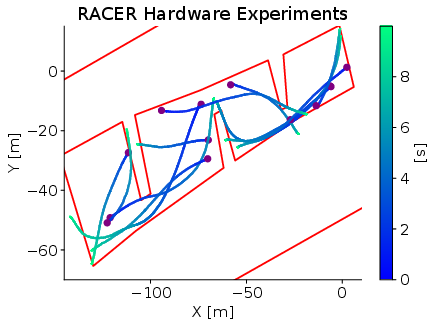
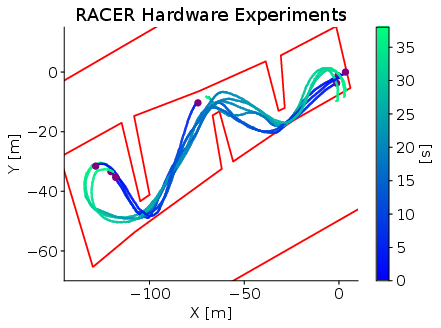
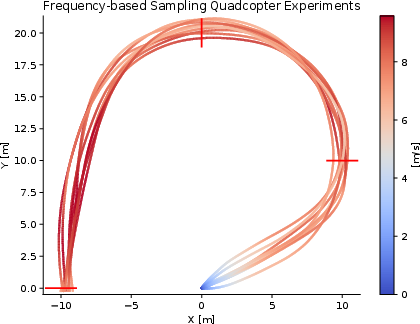
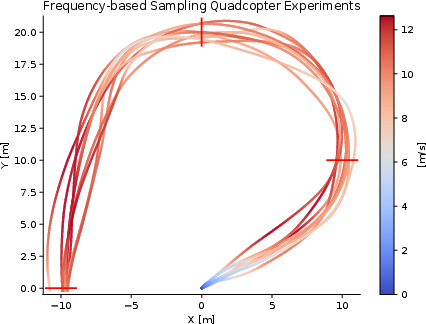
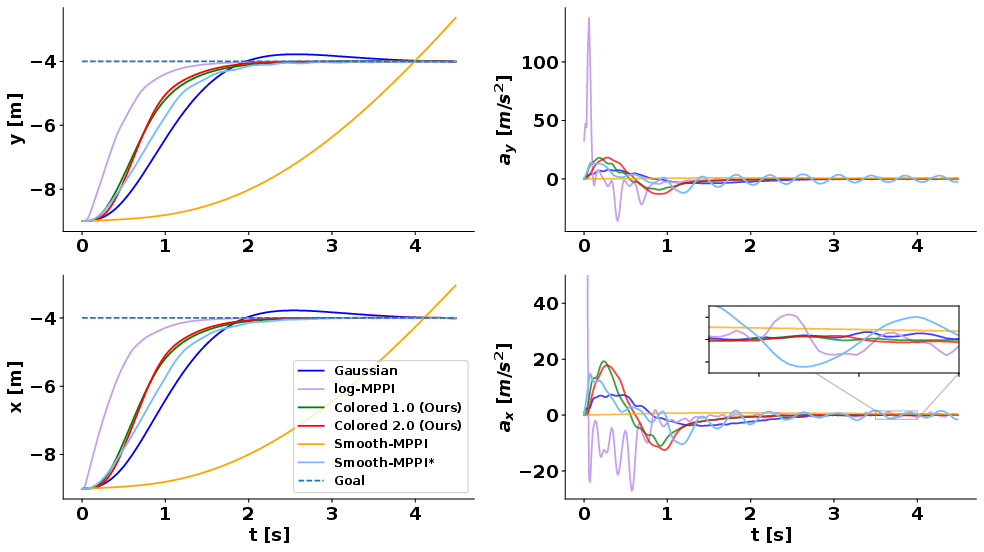
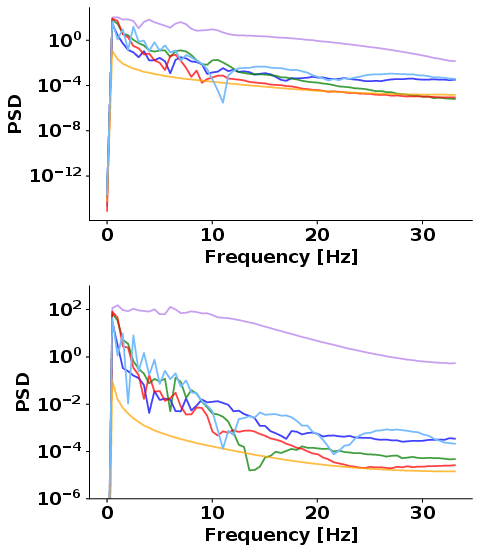
Abstract: Sampling-based model-predictive controllers have become a powerful optimization tool for planning and control problems in various challenging environments. In this paper, we show how the default choice of uncorrelated Gaussian distributions can be improved upon with the use of a colored noise distribution. Our choice of distribution allows for the emphasis on low frequency control signals, which can result in smoother and more exploratory samples. We use this frequency-based sampling distribution with Model Predictive Path Integral (MPPI) in both hardware and simulation experiments to show better or equal performance on systems with various speeds of input response.
- P. T. Boggs and J. W. Tolle, “Sequential quadratic programming,” Acta numerica, vol. 4, pp. 1–51, 1995.
- R. Rubinstein, “The cross-entropy method for combinatorial and continuous optimization,” Methodology and computing in applied probability, vol. 1, pp. 127–190, 1999. [Online]. Available: https://link.springer.com/article/10.1023/A:1010091220143
- G. Williams, P. Drews, B. Goldfain, J. M. Rehg, and E. A. Theodorou, “Aggressive Driving with Model Predictive Path Integral Control,” in 2016 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2016, pp. 1433–1440. [Online]. Available: https://ieeexplore.ieee.org/document/7487277/
- ——, “Information-Theoretic Model Predictive Control: Theory and Applications to Autonomous Driving,” IEEE Transactions on Robotics, vol. 34, no. 6, pp. 1603–1622, 2018. [Online]. Available: https://ieeexplore.ieee.org/document/8558663/
- Z. Wang, O. So, K. Lee, and E. A. Theodorou, “Adaptive Risk Sensitive Model Predictive Control with Stochastic Search,” in Proceedings of the 3rd Conference on Learning for Dynamics and Control. PMLR, 2021, pp. 510–522. [Online]. Available: https://proceedings.mlr.press/v144/wang21b.html
- J. Watson and J. Peters, “Inferring smooth control: Monte carlo posterior policy iteration with gaussian processes,” in Conference on Robot Learning. PMLR, 2023, pp. 67–79. [Online]. Available: https://proceedings.mlr.press/v205/watson23a/watson23a.pdf
- I. S. Mohamed, K. Yin, and L. Liu, “Autonomous Navigation of AGVs in Unknown Cluttered Environments: Log-MPPI Control Strategy,” IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 10 240–10 247, 2022. [Online]. Available: https://ieeexplore.ieee.org/abstract/document/9834098
- T. Kim, G. Park, K. Kwak, J. Bae, and W. Lee, “Smooth Model Predictive Path Integral Control Without Smoothing,” IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 10 406–10 413, 2021. [Online]. Available: https://ieeexplore.ieee.org/document/9835021
- Z. Wang, O. So, J. Gibson, B. Vlahov, M. S. Gandhi, G.-H. Liu, and E. A. Theodorou, “Variational Inference MPC using Tsallis Divergence,” in Robotics: Science and Systems XVII. Robotics: Science and Systems Foundation, Apr. 2021. [Online]. Available: https://www.roboticsproceedings.org/rss17/p073.html
- A. Lambert, F. Ramos, B. Boots, D. Fox, and A. Fishman, “Stein Variational Model Predictive Control,” in Proceedings of the 2020 Conference on Robot Learning. PMLR, 2021, pp. 1278–1297. [Online]. Available: https://proceedings.mlr.press/v155/lambert21a.html
- J. Sacks and B. Boots, “Learning Sampling Distributions for Model Predictive Control,” in Proceedings of The 6th Conference on Robot Learning. PMLR, Mar. 2023, pp. 1733–1742. [Online]. Available: https://proceedings.mlr.press/v205/sacks23a.html
- T. Power and D. Berenson, “Variational Inference MPC using Normalizing Flows and Out-of-Distribution Projection,” in Robotics: Science and Systems XVIII. Robotics: Science and Systems Foundation, Jun. 2022. [Online]. Available: http://www.roboticsproceedings.org/rss18/p027.pdf
- C. Pinneri, J. Achterhold, M. Rolínek, and G. Martius, “Sample-efficient Cross-Entropy Method for Real-time Planning,” in Proceedings of the 2020 Conference on Robot Learning. PMLR, 2021, pp. 1049–1065. [Online]. Available: https://proceedings.mlr.press/v155/pinneri21a.html
- Z. Zhang, J. Chen, Z. Chen, and W. Li, “Asynchronous Episodic Deep Deterministic Policy Gradient: Toward Continuous Control in Computationally Complex Environments,” IEEE Transactions on Cybernetics, vol. 51, no. 2, pp. 604–613, 2021. [Online]. Available: https://ieeexplore.ieee.org/abstract/document/8946888
- J. Timmer and M. König, “On generating power law noise,” Astronomy & Astrophysics, vol. 300, pp. 707–710, 1995. [Online]. Available: http://jeti.uni-freiburg.de/papers/timmer95.pdf
- R. Bracewell, “The Fourier Transform and its Applications.” McGraw-Hill, 2000, ch. 2.
- E. Zhou and J. Hu, “Gradient-Based Adaptive Stochastic Search for Non-Differentiable Optimization,” IEEE Transactions on Automatic Control, vol. 59, no. 7, pp. 1818–1832, 2014. [Online]. Available: https://ieeexplore.ieee.org/document/6756948
- J. Gibson, B. Vlahov, D. Fan, P. Spieler, D. Pastor, A.-a. Agha-mohammadi, and E. A. Theodorou, “A Multi-step Dynamics Modeling Framework For Autonomous Driving In Multiple Environments,” in 2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, May 2023, pp. 7959–7965. [Online]. Available: https://ieeexplore.ieee.org/abstract/document/10161330
- Y. Song, S. Naji, E. Kaufmann, A. Loquercio, and D. Scaramuzza, “Flightmare: A Flexible Quadrotor Simulator,” in Proceedings of the 2020 Conference on Robot Learning. PMLR, 2021, pp. 1147–1157. [Online]. Available: https://proceedings.mlr.press/v155/song21a.html


Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Collections
Sign up for free to add this paper to one or more collections.

