- The paper presents a novel hierarchical framework that integrates centralized speed planning with decentralized vehicle control using Lagrangian variable speed limits.
- It employs reinforcement learning and kernel smoothing techniques to generate adaptive speed profiles, reducing congestion and shockwave effects.
- Simulations and field tests demonstrated a 5.01% increase in throughput, a 34.14% reduction in fuel consumption, and a 34.36% drop in speed variability.
Hierarchical Speed Planner for Automated Vehicles: A Framework for Lagrangian Variable Speed Limit in Mixed Autonomy Traffic
The paper "Hierarchical Speed Planner for Automated Vehicles: A Framework for Lagrangian Variable Speed Limit in Mixed Autonomy Traffic" (2402.16993) introduces a novel hierarchical control framework aimed at implementing variable speed limits within mixed autonomy traffic environments. This research leverages automated vehicles (AVs) to enhance traffic flow, optimize throughput, and reduce energy consumption through a central system called the Speed Planner, complemented by on-vehicle controllers.
Introduction
Advancements in automated vehicles present an opportunity to address critical challenges in traffic management such as congestion and safety. The study focuses on designing a Lagrangian-based variable speed limit (VSL) framework, distinct from traditional Eulerian methods, to exploit the dynamic capabilities of AVs. The hierarchical VSL system integrates centralized decision-making with decentralized vehicle control, allowing seamless traffic state estimation (TSE) and adaptive speed adjustments.
The hierarchical structure comprises a centralized Speed Planner that processes massive traffic data and decentralized vehicle controllers that implement speed decisions. The Speed Planner ingests macroscopic data from sources like INRIX and microscopic data from vehicle sensors to enhance TSE and generate smooth speed profiles aimed at minimizing shockwaves and congestion-induced inefficiencies.
Methodology
The proposed framework employs a hierarchical architecture, consisting of several key components:
Hierarchical Framework
The hierarchical setup serves as the backbone of the traffic control system, facilitating the integration of macroscopic and microscopic data to produce optimal speed profiles.
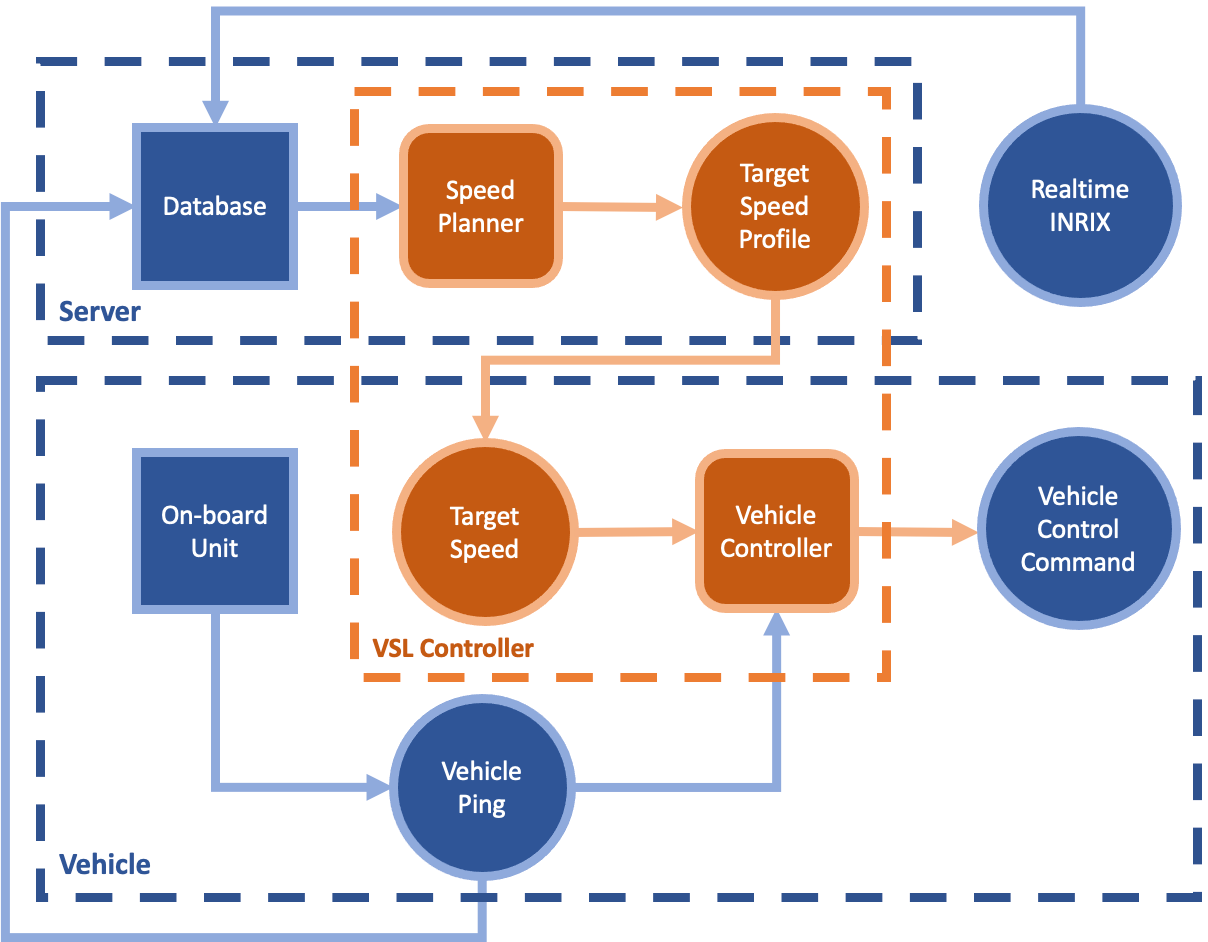
Figure 1: Hierarchical framework of the proposed VSL system: The Speed Planner module fetches inputs from the database to generate real-time target speed profiles. Vehicle controllers receive target speeds via an API, alongside local observations collected by on-board units.
Data Fusion and TSE Enhancement
The TSE enhancement module mitigates the lag in data latency through two primary functions:
- Prediction Module: Addresses the inherent delay in INRIX data by employing a self-attention neural network to predict traffic conditions ahead of time.
- Fusion Module: Merges vehicle-level data with broader traffic predictions to achieve high-resolution lane-specific TSE.
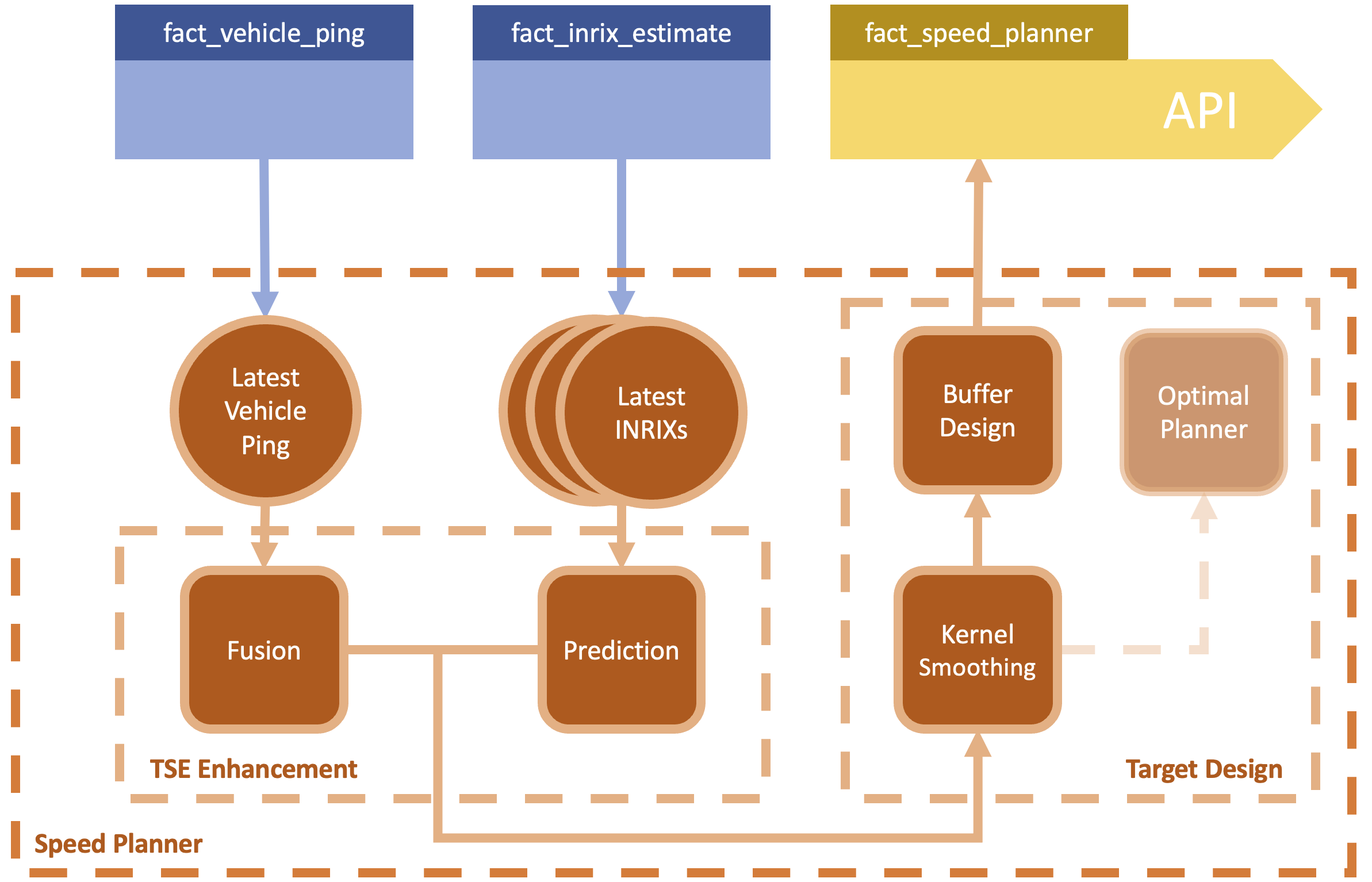
Figure 2: Data pipeline for the Speed Planner: The pipeline involves INRIX data retrieval, vehicle observation fusion, TSE smoothing, and target speed profile publication.
Speed Profile Targeting
Target speed profiles are crafted using methods like kernel smoothing and buffer design to ensure seamless traffic flow, especially in bottleneck situations. The system leverages reinforcement learning (RL) to dynamically adapt speed profiles based on real-time conditions, aiming to reduce shockwave-induced congestion.
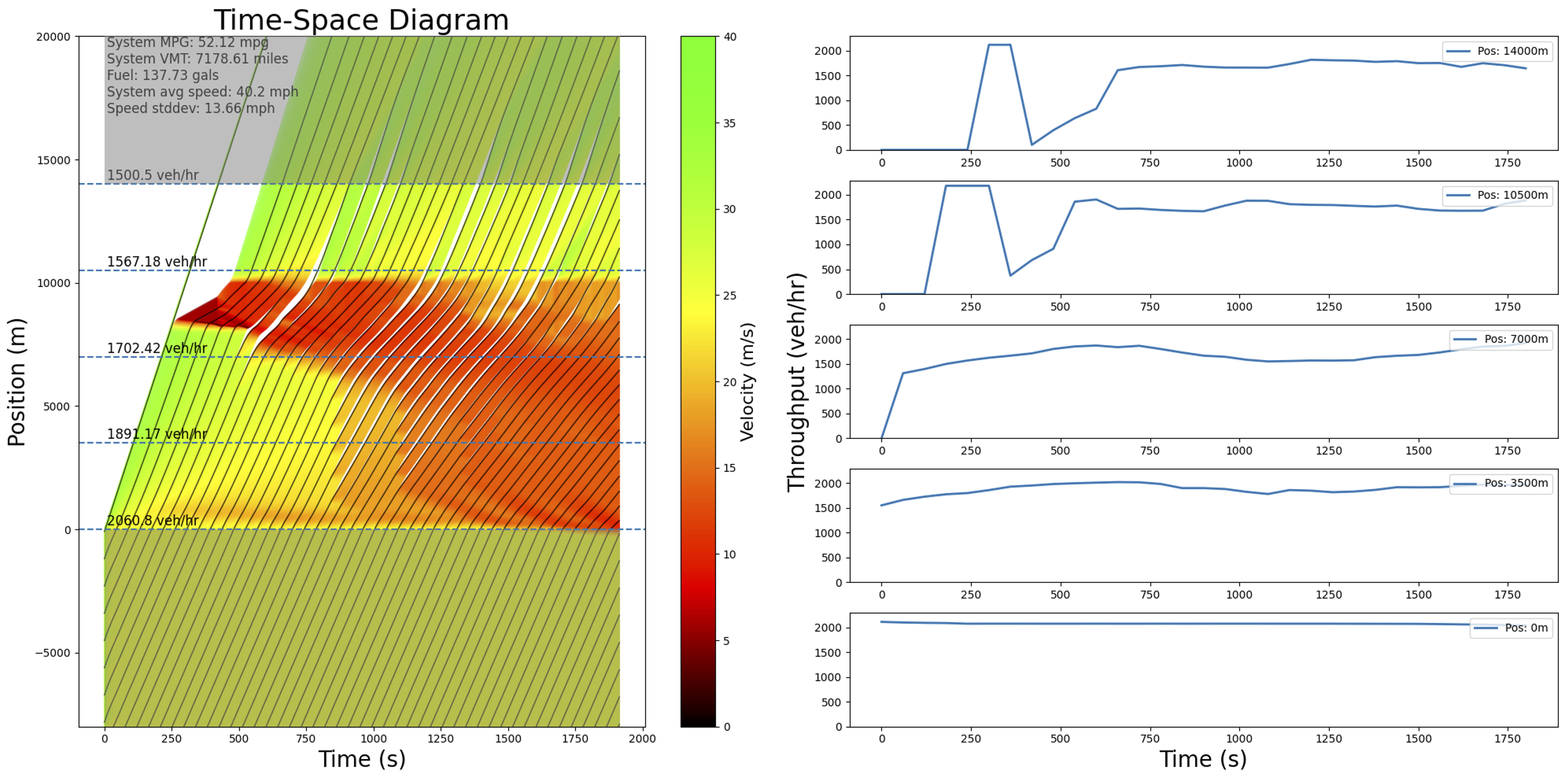
Simulation and Field Testing
Extensive simulations evaluate the effectiveness of the Speed Planner, focusing on metrics such as throughput, miles per gallon (MPG), and speed variability. The framework was tested in the MegaVanderTest, a large-scale deployment involving 100 AVs, which validated the system's capability to enhance traffic flow and reduce fuel consumption.
Key numerical results demonstrate significant improvements:
Conclusion
The study presents a sophisticated hierarchical control mechanism for mixed autonomy traffic systems, showcasing the potential of Lagrangian VSL through computational efficiency and scalability. The findings suggest that as AV technologies evolve, such frameworks could transform existing traffic management paradigms, though considerations for human factors and social acceptance remain critical for widespread adoption. Future research could explore methods to further integrate human-driven vehicle dynamics within the framework and enhance driver engagement strategies for broader application.
The Speed Planner, as validated through rigorous field testing, offers a promising avenue to harness AV capabilities for systemic improvements in traffic congestion and energy sustainability.