- The paper introduces RDA, which reformulates nonconvex collision constraints into biconvex patches, enabling smoother trajectory generation.
- The study leverages a dual parallel approach that significantly reduces computation times by processing multiple obstacle constraints simultaneously.
- Experimental results in simulations and real-world tests demonstrate improved efficiency and robustness over conventional planners.
RDA: An Accelerated Collision-Free Motion Planner for Autonomous Navigation
Introduction to Motion Planning Challenges
Autonomous motion planning in environments with multiple obstacles presents significant challenges, primarily due to the nonconvex collision avoidance constraints. Classical optimization techniques that approach these constraints directly often fail to leverage the constraint structures effectively, resulting in prohibitive computation times. The paper "RDA: An Accelerated Collision Free Motion Planner for Autonomous Navigation in Cluttered Environments" (2210.00192) introduces the Regularized Dual Alternating Direction Method of Multipliers (RDADMM or RDA), specifically designed to address these challenges by reformulating the motion planning problem and executing parallel computation of collision avoidance constraints.
Novel Contributions of RDA
Optimization Formulation: The RDA method reformulates the nonconvex constraints into biconvex patches through strategic linearization and duality. This allows for smooth trajectory generation while enabling parallel computation across obstacles, greatly reducing processing time.
Dual Parallel Approach: By decoupling the constraints related to different obstacles, RDA allows for parallel computation, thereby significantly improving efficiency. Unlike traditional methods, which tend to struggle with high-density environments, RDA maintains robust performance.
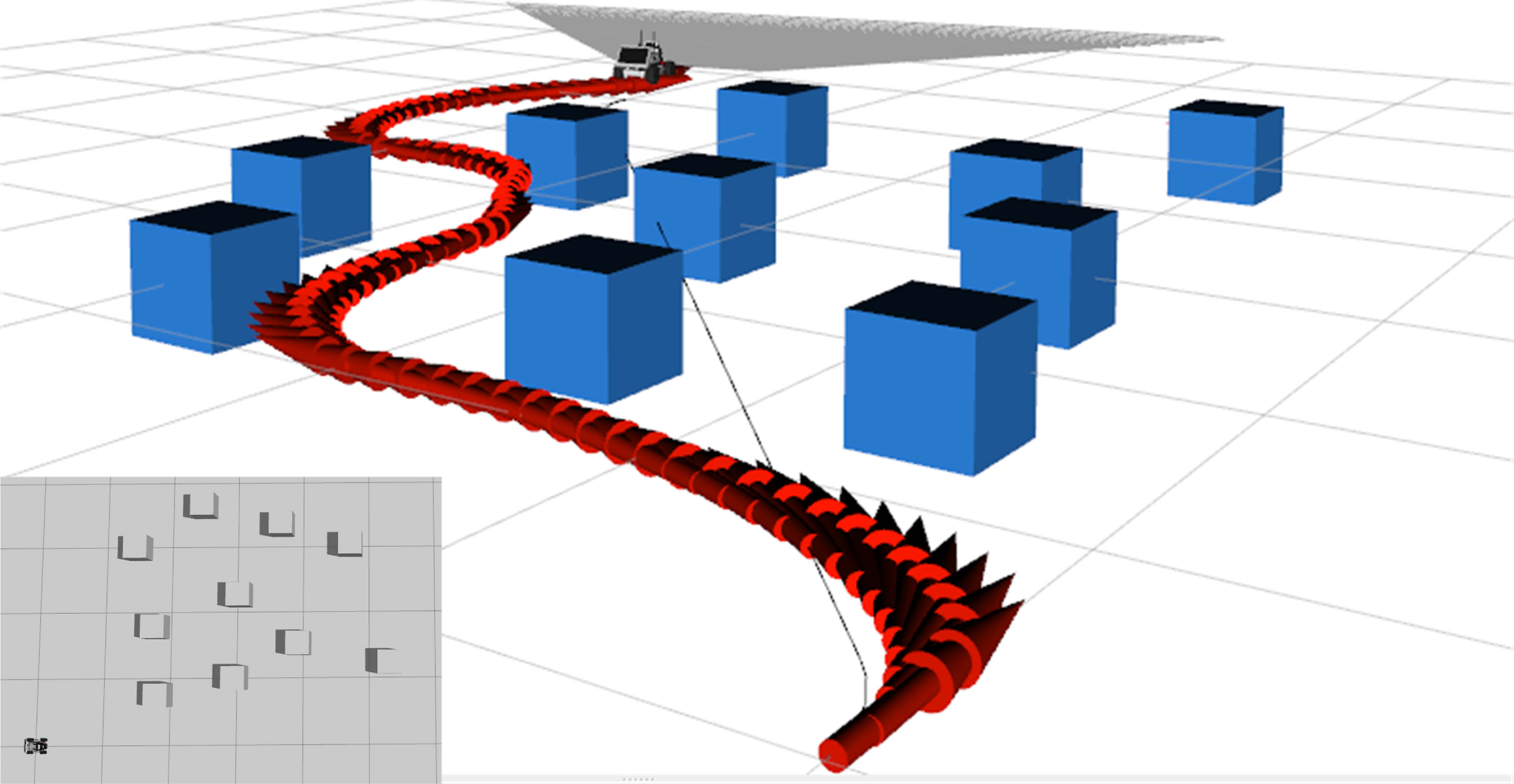
Experimental Validation: Extensive validation experiments demonstrate that RDA generates smoother paths with less computation time compared to benchmarks, robustly handling real-world cluttered environments. The experiments utilize both simulation with car-like robots and real-world Ackermann autonomous vehicles.
Numerical simulations, Gazebo simulations, and hardware implementations of the RDA method demonstrate its superiority in terms of both execution time and robustness in collision-free autonomous navigation tasks:
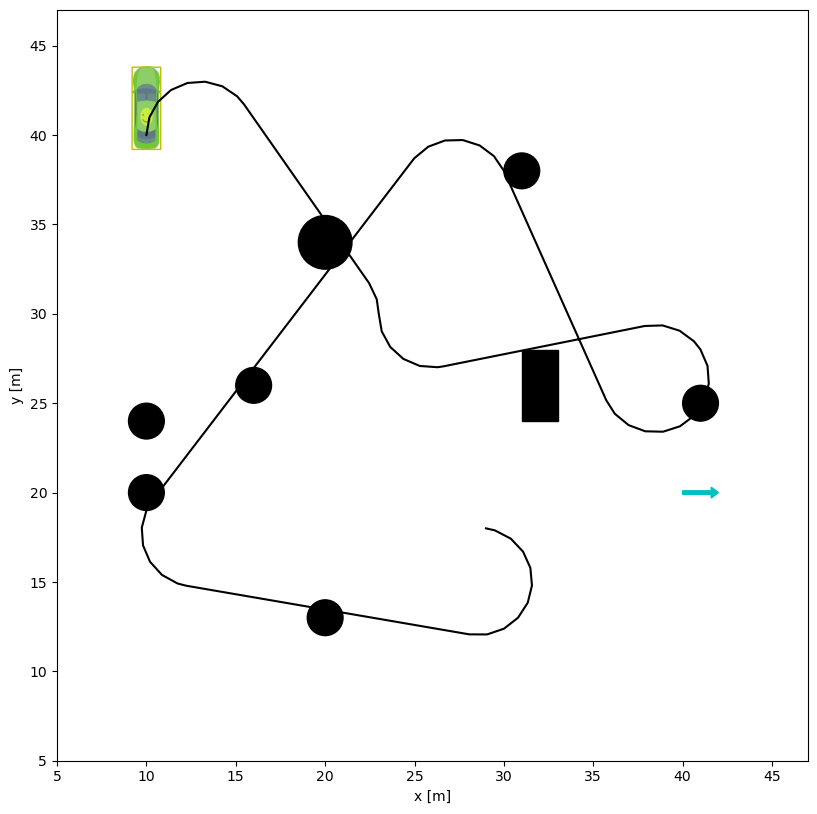
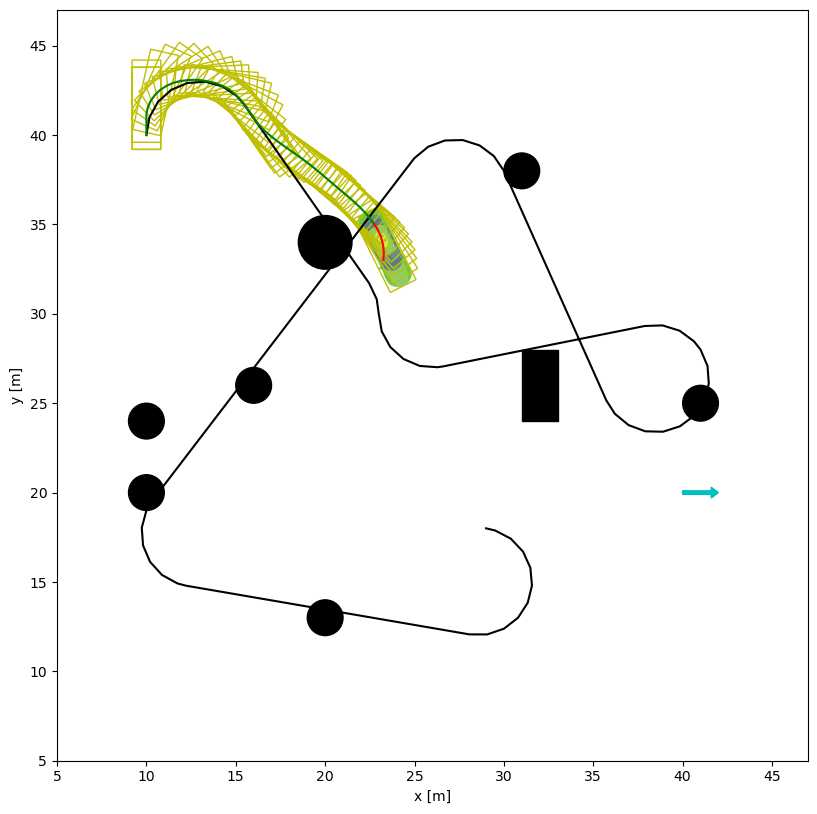
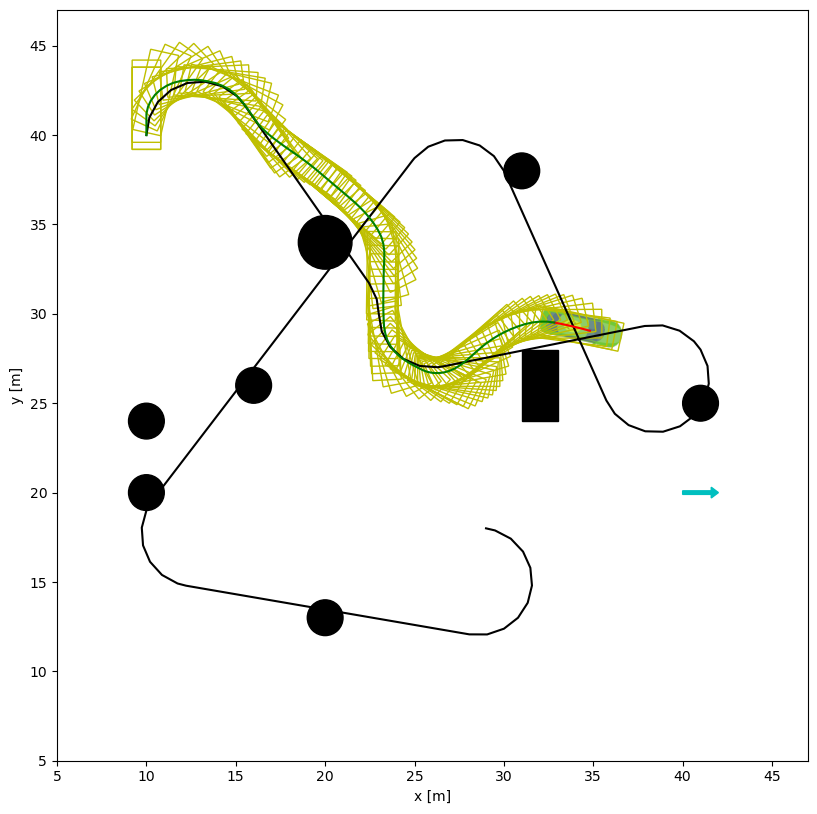
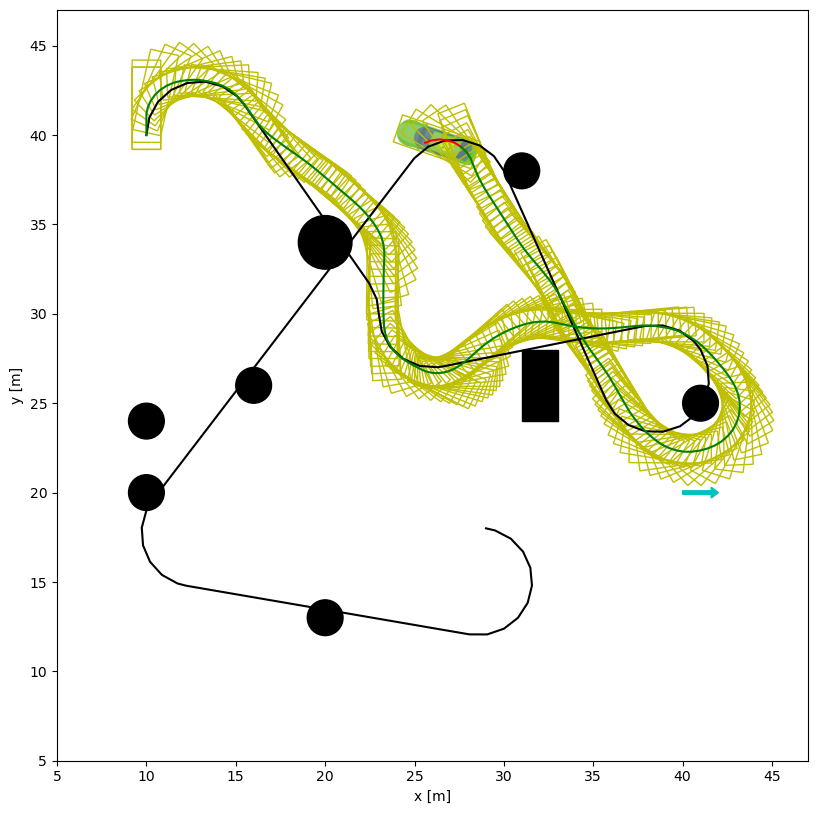
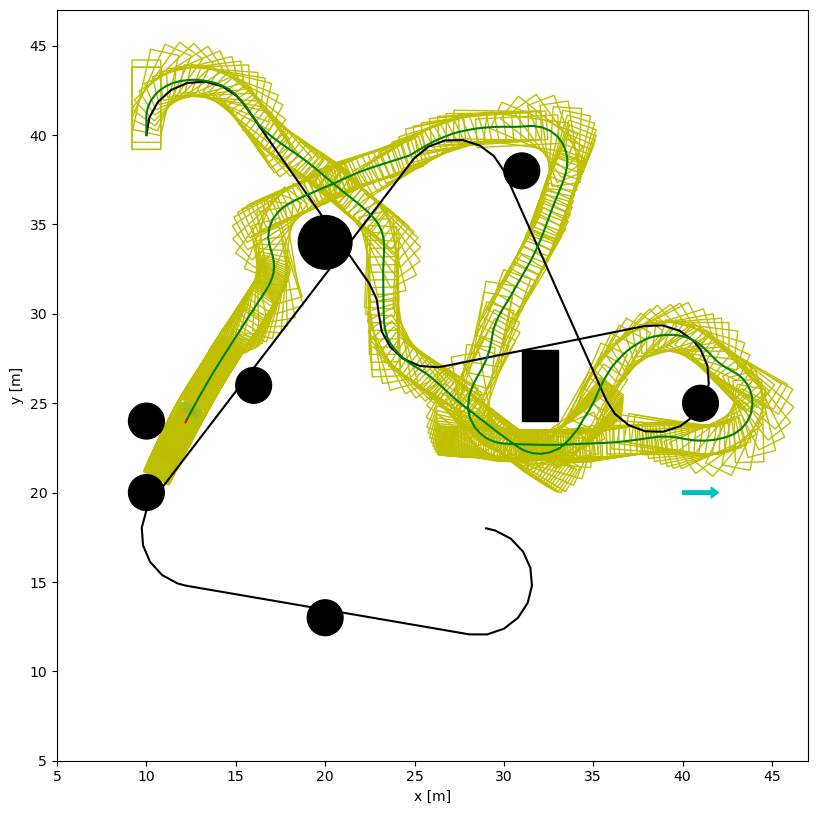
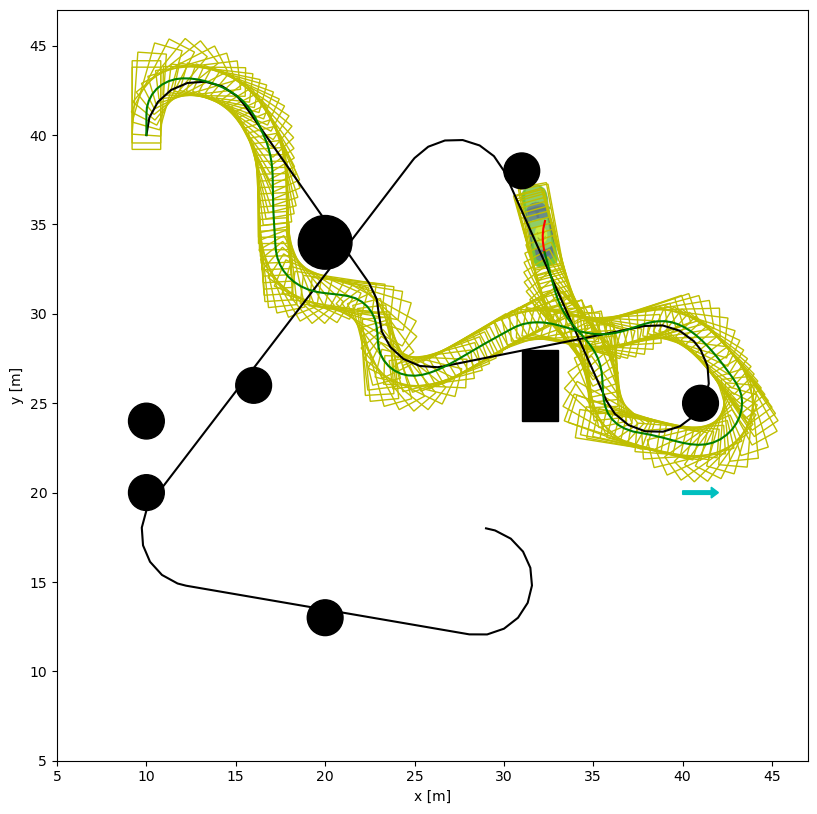
Figure 1: RDA at time step 0
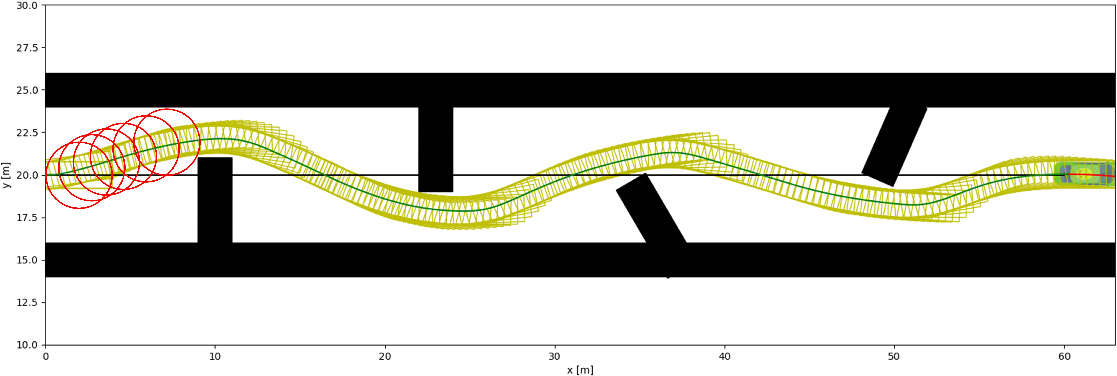
Figure 2: RDA (yellow box) and PMA (red circle) trajectories in the corridor.
Computational Complexity and Insights
The study details the computational efficiency of RDA, highlighting its linear scalability with the number of obstacles due to parallel computation capabilities. By warm-starting subsequent optimization cycles using cached previous solutions, RDA optimizes convergence speeds further, maintaining high-frequency operation without significant performance degradation.
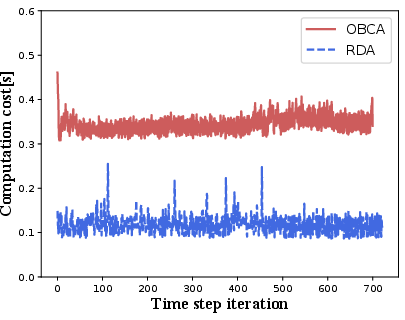
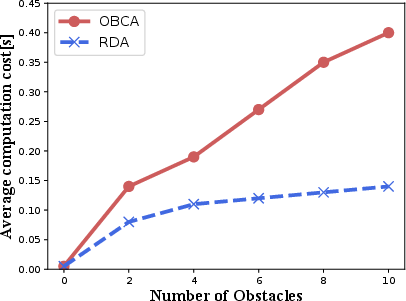
Figure 5: Computation cost in one trial.
Conclusion and Future Directions
RDA presents a significant advancement in optimization-based motion planning within cluttered environments, offering practical improvements in computational efficiency and robustness over existing methods. Future work will explore applications in high-speed vehicular scenarios and multi-vehicle frameworks to validate scalability and real-world adaptability further. Experimental results encourage deployment in diverse autonomous navigation systems, potentially elevating standard practices in robotics and autonomous vehicle industries.
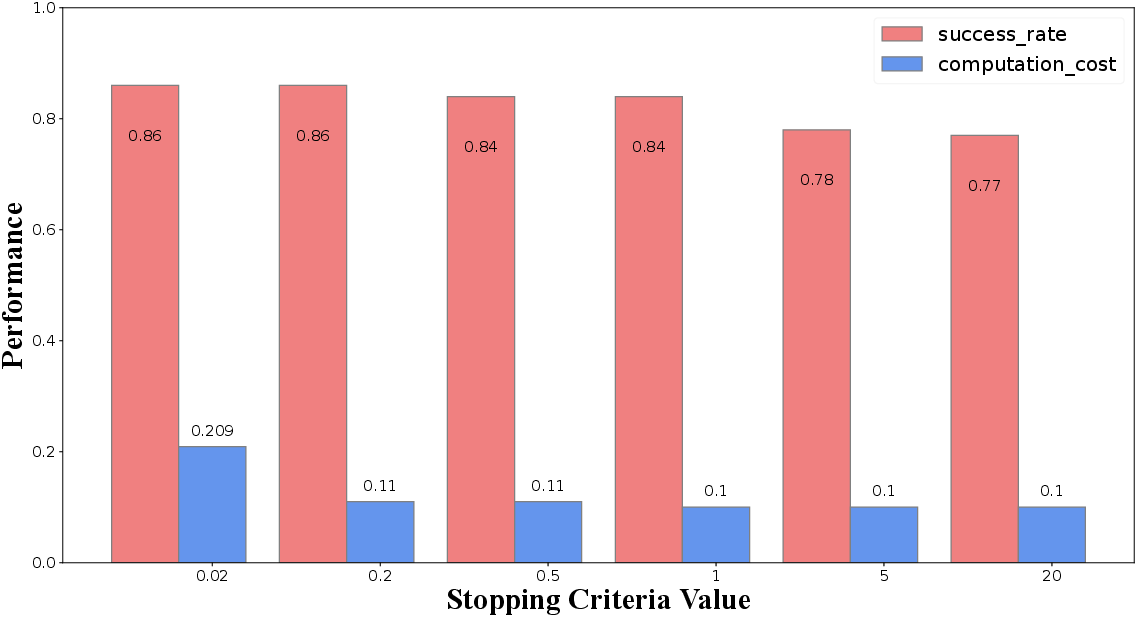
Figure 6: The success rate and computational cost under different stopping criteria values.