- The paper introduces a fully decentralized LiDAR-inertial odometry system that uses mutual observations to achieve centimeter-level localization accuracy in GPS-denied environments.
- It employs a novel 3D LiDAR-based drone detection pipeline integrated with an error state iterated Kalman filter to robustly fuse LiDAR and IMU data.
- Experimental evaluations show improved performance over single-agent solutions, demonstrating real-time operation, scalability, and resilience in challenging settings.
Decentralized LiDAR-Inertial Odometry for Aerial Swarms: Swarm-LIO
Introduction
Swarm-LIO presents a fully decentralized LiDAR-inertial odometry (LIO) framework for aerial swarms, enabling each UAV to perform real-time, accurate ego-state and relative-state estimation using only onboard LiDAR and IMU sensors. The system leverages a novel 3D LiDAR-based drone detection, identification, and tracking pipeline, tightly coupling mutual observation measurements with LiDAR and IMU data under an Error State Iterated Kalman Filter (ESIKF) framework. This approach eliminates reliance on external infrastructure (e.g., GPS, motion capture, UWB anchors), mitigates single-point-of-failure risks, and achieves centimeter-level localization accuracy in challenging, GPS-denied, and degenerate environments.
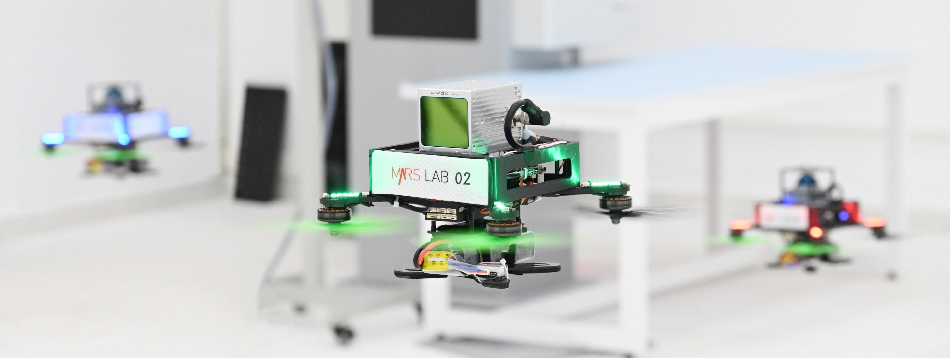
Figure 1: Indoor flights of the proposed aerial swarm with three drones.
System Architecture
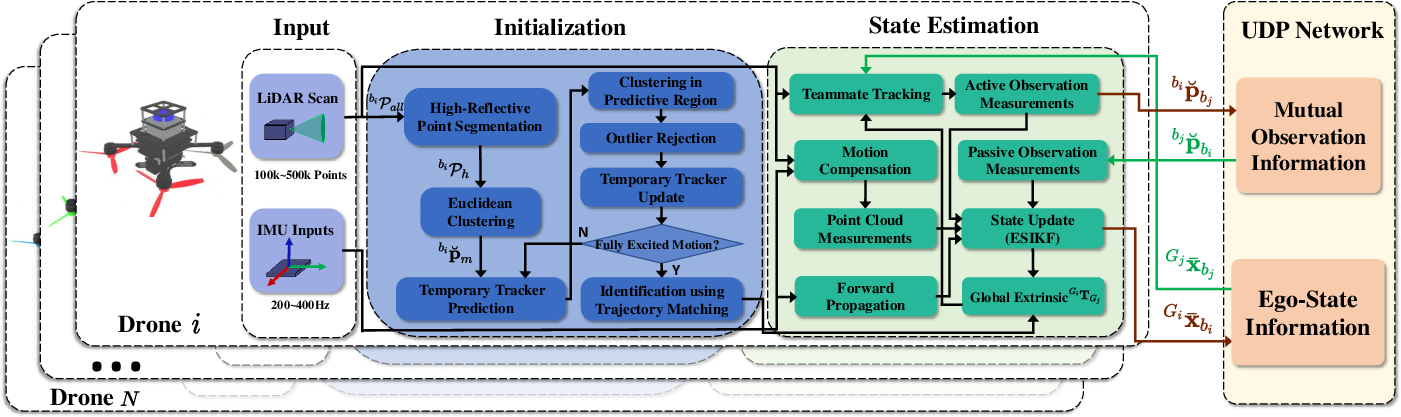
Each drone executes an independent copy of the Swarm-LIO framework, comprising the following modules:
Drone Detection, Identification, and Tracking
Detection leverages LiDAR reflectivity to isolate high-reflectivity points corresponding to teammate drones. Clustering and outlier rejection ensure only valid drone-sized objects are tracked. Trajectory excitation is assessed via singular value decomposition of the tracked positions; only sufficiently excited trajectories are used for matching. Trajectory matching solves for the SE(3) transformation aligning the tracked object trajectory with a received teammate trajectory, using a sliding window and timestamp alignment to handle communication delays.
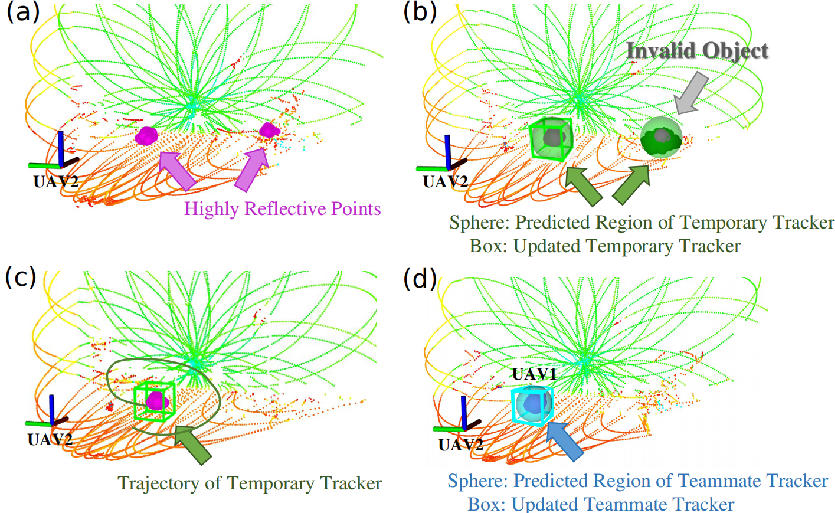
Figure 3: Initialization for newly detected objects, showing reflectivity filtering, outlier rejection, trajectory accumulation, and successful identification via trajectory matching.
Once identified, teammate trackers are maintained using received velocity and pose data, with state updates performed even when the drone is outside the field-of-view (FoV), ensuring persistent relative-state estimation.
Decentralized LiDAR-Inertial State Estimation
The state vector for each drone includes pose, velocity, IMU biases, gravity, and global extrinsic transformations to all other drones. State prediction is performed at IMU rates using the ⊞ operation on the SO(3)×Rn manifold. State updates are triggered by new LiDAR scans, fusing point-to-plane residuals and mutual observation constraints (active and passive) in the ESIKF. The mutual observation residuals provide strong geometric constraints, particularly in degenerate environments where LiDAR point-cloud features are insufficient.
Experimental Evaluation
Each UAV is equipped with a Livox LiDAR (Mid360 or Avia), Pixhawk flight controller (BMI055 IMU), and Intel NUC onboard computer. Reflective tapes facilitate detection. Time synchronization is achieved via NTP.
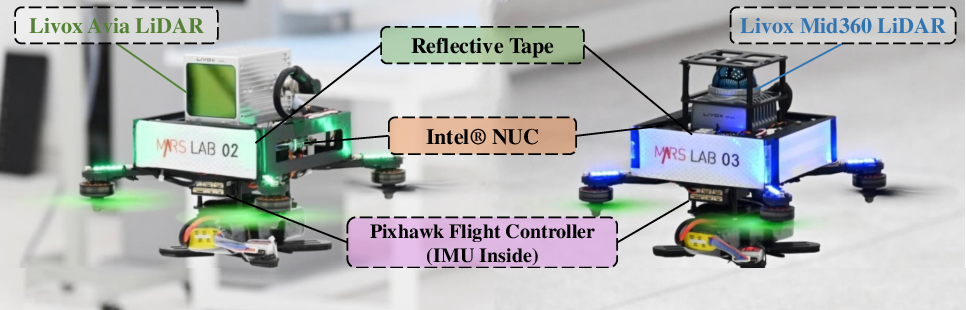
Figure 4: The UAV platform of the proposed swarm system (drone 3 shown).
Indoor Localization Accuracy
Five indoor flights were conducted, with motion capture providing ground-truth. Swarm-LIO consistently achieves lower RMSE than FAST-LIO2 (single-agent LIO), especially for drones with limited LiDAR FoV (Livox Avia), where mutual observation constraints compensate for insufficient point-cloud features. For drones with 360° FoV (Mid360), both methods perform comparably.
Robustness in Degenerate Environments
Swarm-LIO demonstrates resilience in scenarios where single-agent LIO fails:
- Smooth Wall: FAST-LIO2 exhibits severe drift due to lack of geometric constraints; Swarm-LIO maintains accurate localization by fusing passive observations from teammates.
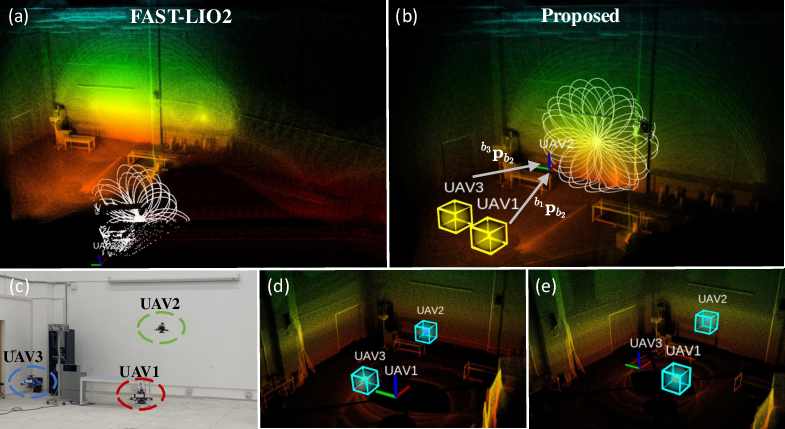
Figure 5: Degenerate smooth wall experiment; Swarm-LIO corrects drift via passive observation fusion.
- Smooth Corridor: Swarm-LIO enables sequential traversal of a corridor by leveraging mutual observations from drones stationed at structurally rich locations, maintaining accurate pose estimation throughout.
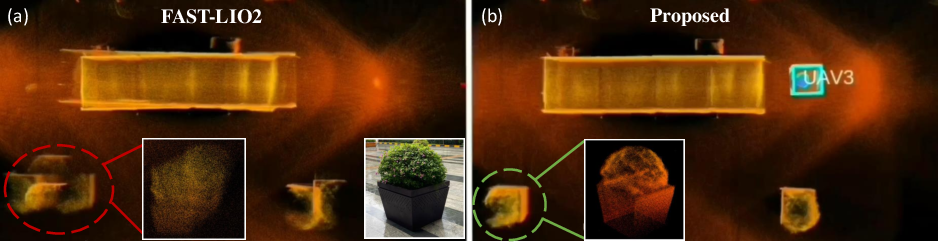
Figure 6: Point-cloud map of smooth cuboid corridor scene; Swarm-LIO recovers structural details lost by FAST-LIO2.
Large-Scale Decentralized Exploration
Swarm-LIO supports fully autonomous initialization and global extrinsic calibration without prior information. Drones explore distinct regions, and their maps are merged offline using estimated transformations, yielding consistent global reconstructions. Even after long periods without mutual observation, the predicted and detected teammate positions remain within 17 cm, evidencing high extrinsic estimation accuracy.
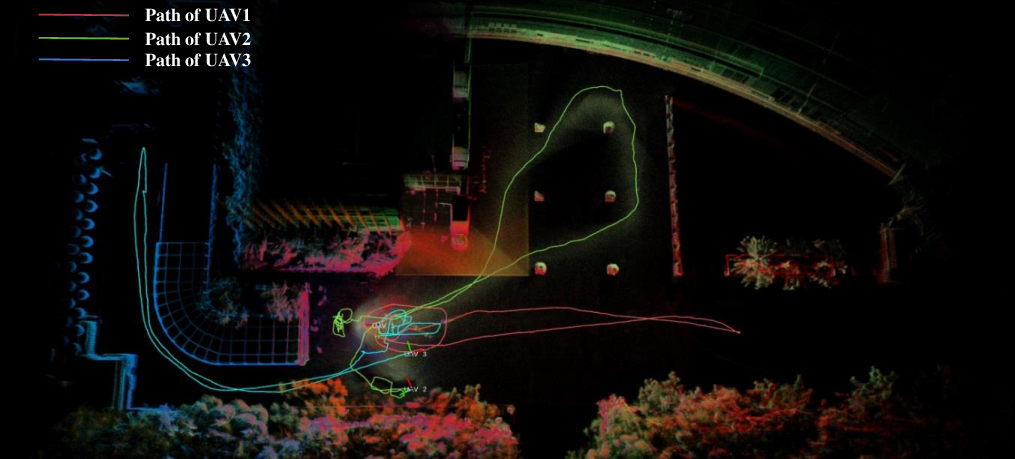
Figure 7: Merged point-cloud map from three drones, demonstrating accurate global extrinsic calibration.
- Computational Efficiency: Swarm-LIO achieves real-time performance (17.5 ms per scan) comparable to FAST-LIO2 (14.8 ms per scan), despite additional mutual observation processing.
- Communication Overhead: Only ego-state and observation data are exchanged, minimizing bandwidth requirements and supporting scalability.
- Hardware Requirements: All computation is performed onboard; no external infrastructure is required.
- Scalability: The framework is designed for extensibility to larger swarms, with decentralized operation mitigating SPOF risks.
Implications and Future Directions
Swarm-LIO advances decentralized state estimation for aerial swarms, enabling robust operation in GPS-denied and degenerate environments. The tight coupling of mutual observation constraints with LiDAR-inertial data yields strong geometric consistency and resilience to sensor limitations. The reliance on reflective tapes for detection is a practical compromise, but future work may explore markerless detection via geometric or learning-based methods. Scaling to larger swarms and more complex tasks (e.g., collaborative mapping, search and rescue) is feasible given the low communication and computational overhead.
Conclusion
Swarm-LIO provides a robust, decentralized, and accurate LiDAR-inertial odometry solution for aerial swarms, validated in real-world experiments across challenging scenarios. The integration of mutual observation constraints and autonomous initialization enables reliable localization and mapping without external infrastructure, supporting advanced multi-UAV applications in complex environments. Future research may focus on markerless detection, improved initialization, and scaling to larger swarms.