- The paper introduces a taxonomy differentiating constant impedance, variable impedance control, and learning-based models.
- The paper outlines methodologies employing Gaussian Mixture Models, Reinforcement Learning, and Imitation Learning to adapt impedance parameters.
- The paper emphasizes enhanced system stability and safety in human-robot interactions through advanced energy-based and passive control strategies.
Variable Impedance Control and Learning: A Review
The exploration of Variable Impedance Control (VIC) and Learning (VIL) is a pivotal arena in the field of robotics, marking significant strides towards achieving adept robotic systems capable of interacting with dynamic and unpredictable environments. This essay encapsulates the critical components presented in "Variable Impedance Control and Learning -- A Review" (2010.06246), and discusses the varied methodologies and advancements in the domain.
Introduction to Variable Impedance Control
Variable Impedance Control (VIC) stands as a critical mechanism enabling robots to modulate their compliance in response to environmental dynamics. VIC departs from traditional high-gain feedback controls, proving advantageous in reducing impact forces during interactions with humans or other robots. The foundational role of VIC is to ensure safe, efficient operations in complex scenarios such as disaster response, healthcare assistance, and cooperative manipulations.
Block Scheme of Impedance Control
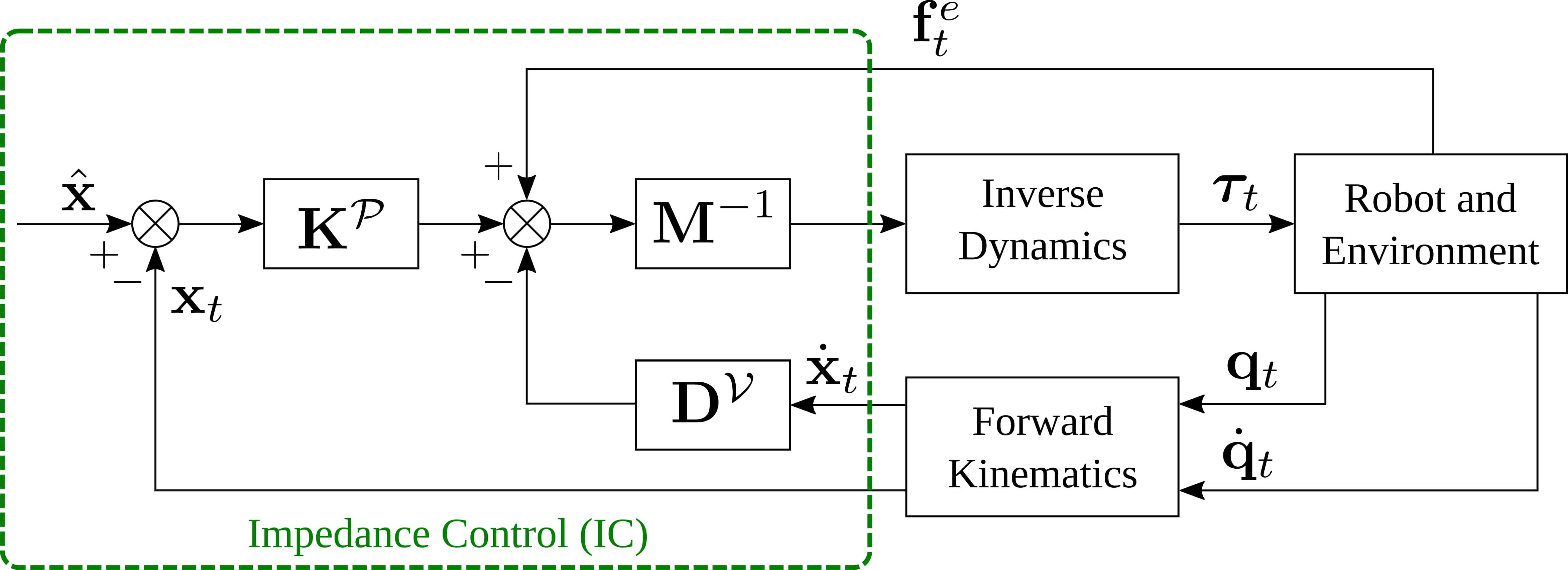
Figure 1: Block scheme of impedance control, obtained assuming that x^˙=x^¨=0.
Impedance control employs a model where the robot's motion can be seen as a virtual spring-damper system, where system dynamics equations guide robot interactions. This is essential for tasks where precision and force variability are critical, such as surgical robots or collaborative industrial applications.
Advancements in Variable Impedance Learning
Variable Impedance Learning (VIL) expands the utility of VIC by leveraging machine learning techniques to adaptively tune impedance parameters based on experienced interactions instead of pre-defined models. VIL accommodates the variability and uncertainty of real-world tasks through learning from demonstrations and iterative processes. It plays a significant role when robots engage in highly dynamic or evolving tasks, requiring adaptation in real-time.
Block Scheme of Variable Impedance Learning
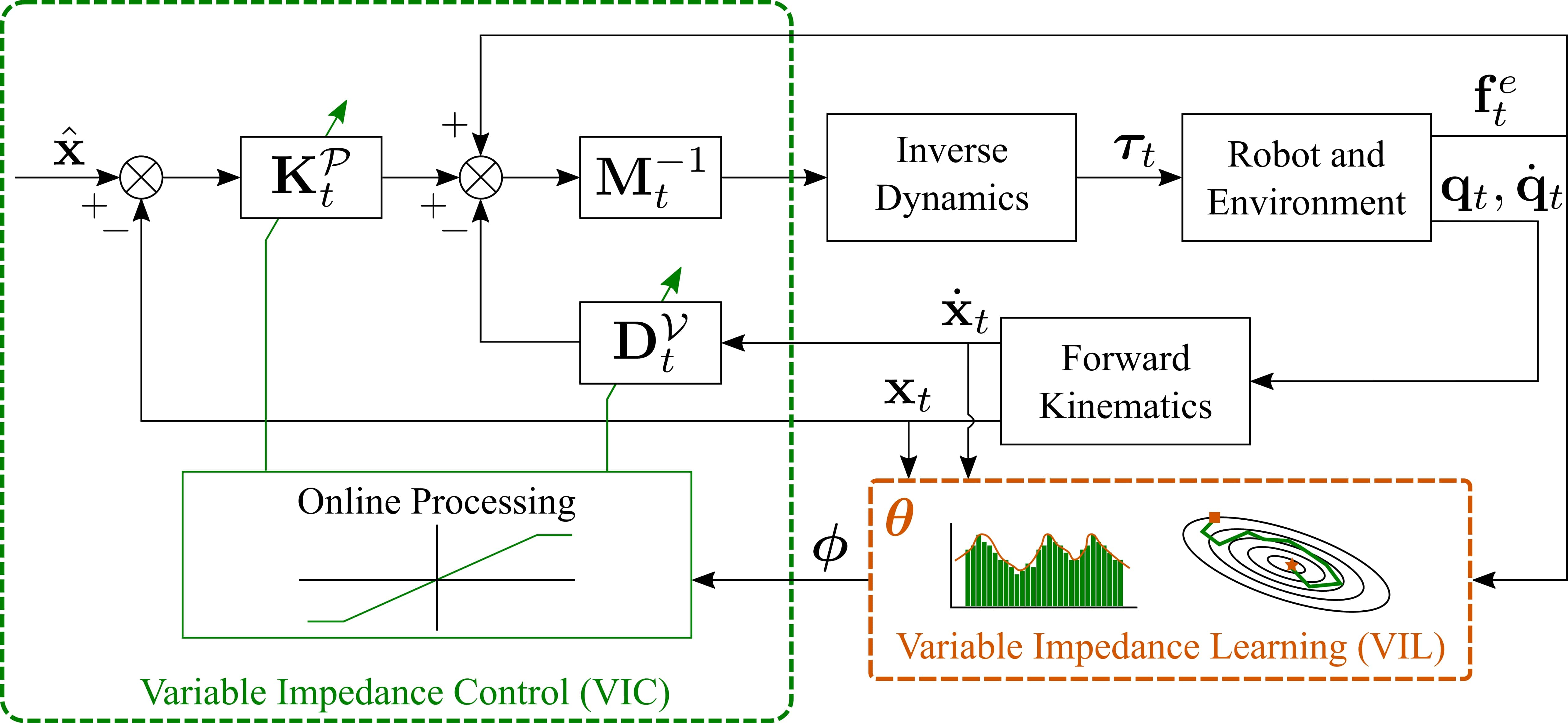
Figure 2: Block scheme of Variable Impedance Learning (VIL), obtained assuming that x^˙=x^¨=0.
Learning approaches such as Gaussian Mixture Models (GMM), Reinforcement Learning (RL), and Imitation Learning (IL) are frequently utilized to model and predict impedance parameters to optimize performance and safety. Integrating these learning systems enables robots to refine their behaviors, merging passive compliance with learning-induced active strategies.
Taxonomy of VIC and Learning Approaches
The paper delineates a new taxonomy for mechanical impedance, categorizing it based on mechanisms of variability, learning, and control paradigms. This taxonomy provides clarity on how different methodologies intersect and where innovations in learning aids control beyond static parameters:
- Constant Impedance: Traditional methods relying on fixed stiffness settings.
- Variable Impedance Control (VIC): Inclusion of dynamic, time-variant parameters tailored through feedback from the environment.
- Variable Impedance Learning (VIL): Adaptive models influenced by data-driven training.
- Variable Impedance Learning Control (VILC): A synthesis of learning and control, where learning influences the control policy iteratively.
Stability and Passivity in VIC Systems
Ensuring system stability and passivity is paramount in VIC frameworks, especially in human-robot interaction (HRI) where safety is a primary concern. Techniques to guarantee passivity include energy tanks, Lyapunov-based controllers, and passive system frameworks to ensure the energy consistency in robotic operations. These control strategies mitigate risks during unforeseen system dynamics or human impact.
Block Scheme of VIC
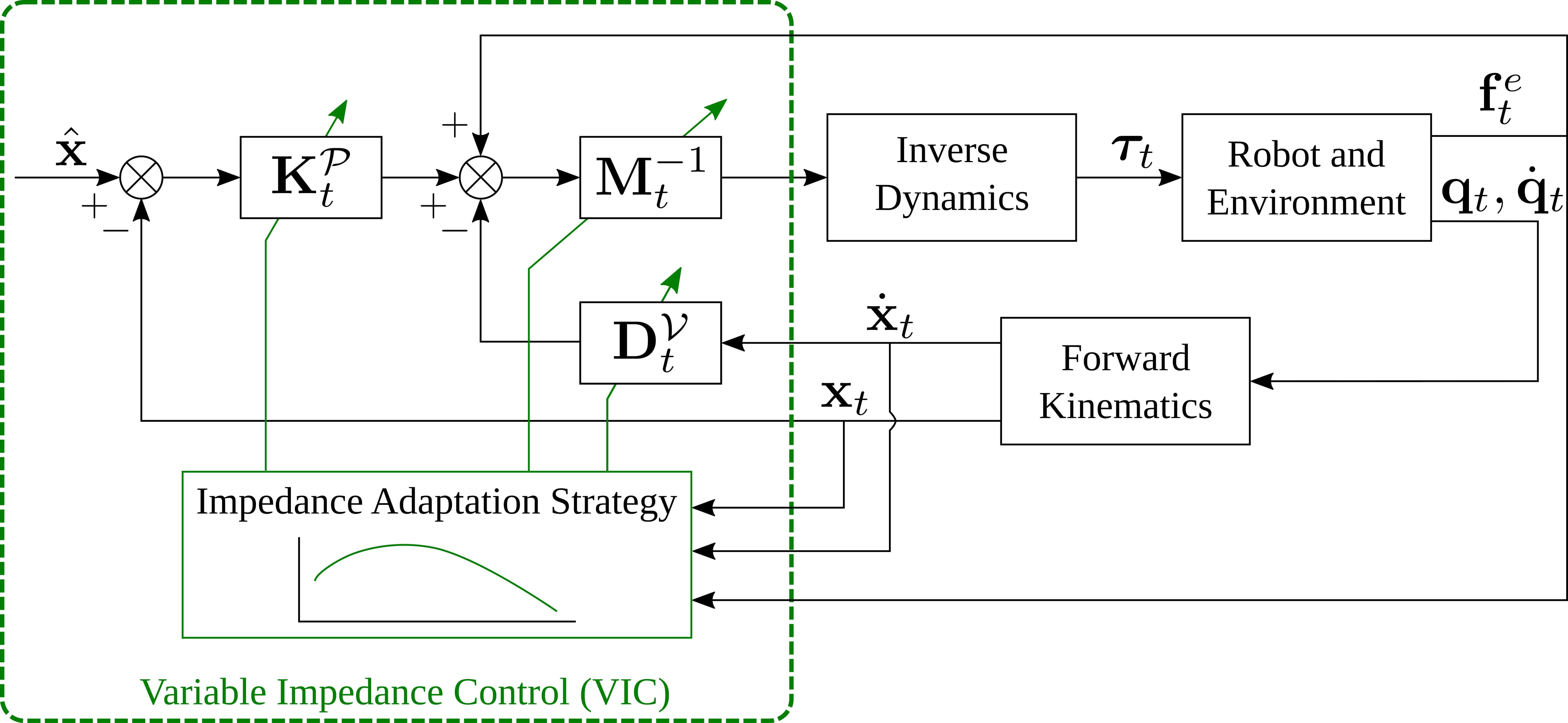
Figure 3: Block scheme of Variable Impedance Control (VIC), obtained assuming that x^˙=x^¨=0.
Integration with Human-in-the-Loop Systems
A significant application of VIC and VIL is in human-robot cooperative tasks, such as exoskeleton support and collaborative assembly lines. These systems utilize human feedback, often measured through EMG signals or direct force interactions, to predict human intent and adapt impedance accordingly. However, this requires sophisticated sensor integrations and precise force-detecting capabilities to accurately simulate and predict needed adjustments in real-time interactions.
Conclusion
The integration of VIC and VIL embodies a transformative approach in robotics, balancing compliance with adaptability to achieve synergy in environments that demand both precision and flexibility. Though advances in stability, learning methodologies, and human-robot collaboration have addressed many challenges, ongoing research is required to fine-tune these systems further. As robotics progresses, the confluence of VIC and VIL will undoubtedly be pivotal in the burgeoning capabilities of autonomous systems, particularly in ensuring safe, efficient interaction across diverse fields.