- The paper presents a novel reservation-based scheduling policy for platoons that reduces vehicle delays and variance at intersections.
- The methodology incorporates a comprehensive nonlinear vehicle dynamics model and realistic platooning to optimize fuel consumption and ensure safety.
- Simulation results validate that the proposed PVM and PDM strategies outperform traditional traffic signals in enhancing traffic flow and throughput.
PAIM: Platoon-based Autonomous Intersection Management
Introduction
The emergence of autonomous ground vehicles and advancements in Intelligent Transportation Systems have brought significant attention to Autonomous Traffic Management, particularly focusing on Autonomous Intersection Management (AIM), also known as Cooperative Intersection Management (CIM). These systems aim to optimize traffic flow, reducing delays, fuel consumption, and emissions while enhancing safety. The paper introduces a novel reservation-based policy utilizing cost functions to derive optimal schedules for vehicle platoons traversing intersections. This policy ensures safety by preventing vehicles with conflicting turning movements from entering the conflict zone simultaneously.
Cooperative Intersection Management
CIM represents an alternative approach to the traditional traffic management systems like traffic lights and stop signs, which are known to contribute to traffic inefficiency and accidents. CIM takes advantage of Vehicular Adhoc Networks (VANETs) supporting Vehicle to Vehicle (V2V), Vehicle to Infrastructure (V2I), and Vehicle to Pedestrian (V2P) communications. The paper references existing CIM strategies categorized into centralized and decentralized methods. Centralized approaches rely on a central authority managing traffic flow while decentralized methods involve collaborative decision-making among vehicles.
Centralized Methods
Research by Dresner et al. on centralized algorithms, such as FCFS reservation-based policies, demonstrates improved traffic efficiency over traditional traffic lights. Other centralized approaches use queue-based polling systems and nonlinear optimization for signal enhancement in autonomous vehicle contexts. These are complemented by detailed coordination algorithms to optimize vehicle trajectories.
Decentralized Methods
In decentralized systems, vehicles independently manage their trajectories using shared information, employing collision avoidance protocols to enhance safety and throughput. Such systems, however, face challenges concerning communication bandwidth and scalability.
Vehicle Dynamics and Platooning
The paper improves upon simplistic models of vehicle dynamics by incorporating a comprehensive nonlinear model that includes braking and turning influences, providing more realistic simulations of vehicle behavior. This model is essential for the accurate implementation of the fuel consumption approximation used to evaluate the benefits of various traffic management strategies.
Cooperative Adaptive Cruise Control (CACC)
The adopted platooning strategy leverages communication between platoon leaders and the intersection infrastructure, reducing the communication overhead and enhancing scheduling efficiency. The Predecessor-Leader-Follower topology ensures robust and stable platoon control throughout intersection negotiation.
Platoon-based Autonomous Intersection Management
The proposed reservation-based policy uses an optimization approach to allocate intersection slots for vehicle platoons, minimizing average delay and variance in compliance with traffic safety protocols. A simplified communication system—streamlining interactions between platoon leaders and the intersection manager—facilitates efficient V2I communication, enhancing practical applicability without exposing algorithmic intricacies to vehicle agents.
Simulation Framework
Simulations were conducted utilizing scenarios with varying traffic flow levels and platoon sizes to compare the performance of proposed policies—Platoon-based Variance Minimization (PVM) and Platoon-based Delay Minimization (PDM)—against traditional four-phase traffic light controllers.
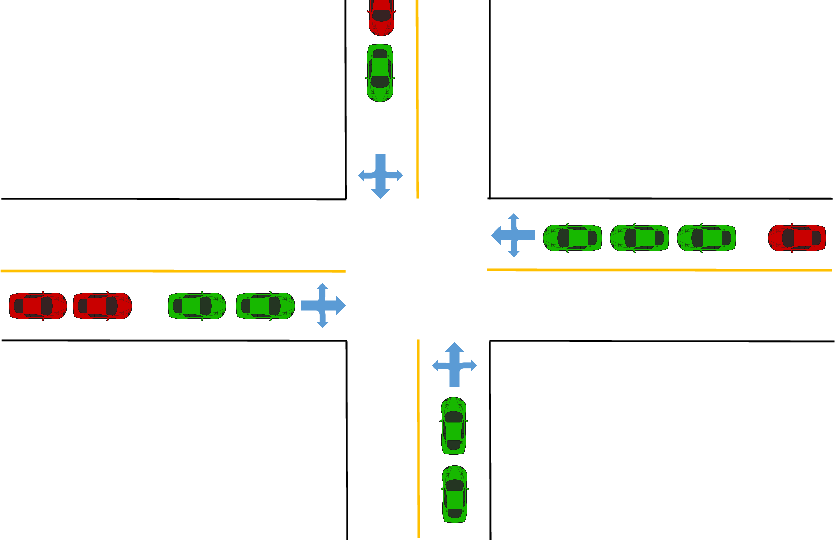
Figure 1: 4-way Intersection Geometry.
Results
The results indicated that both PVM and PDM policies significantly outperform traditional traffic light controls, notably reducing average vehicle delay and enhancing intersection throughput.
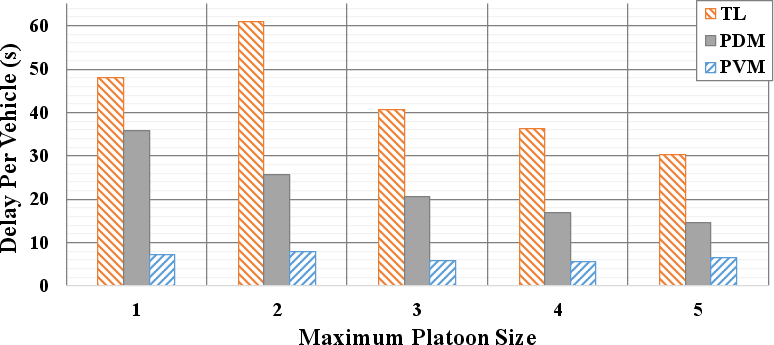
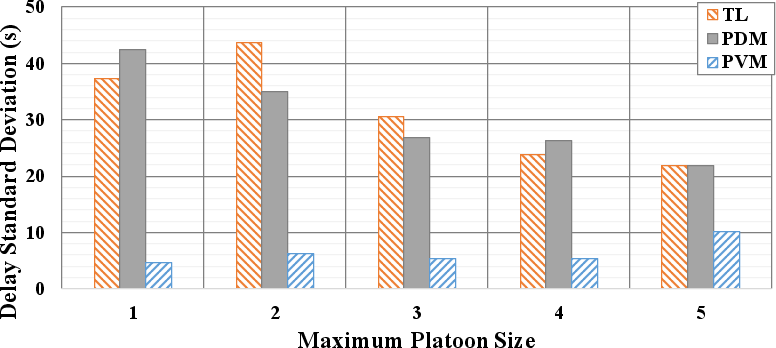
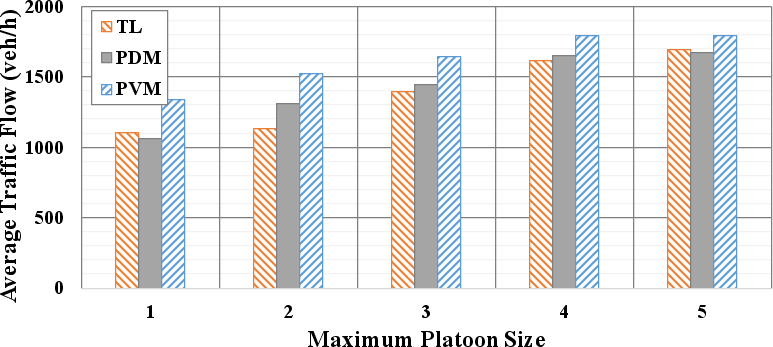
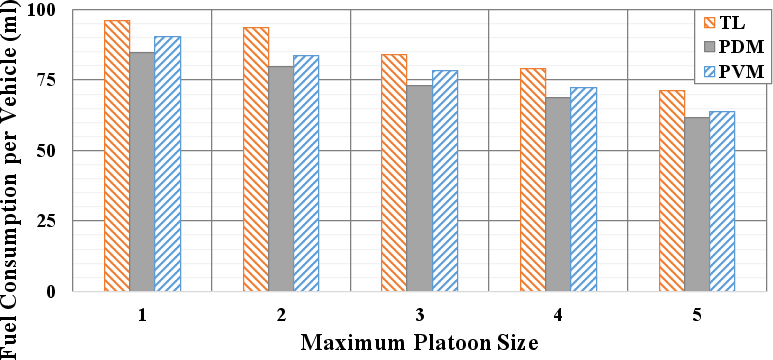
Figure 2: Average Delay Per Vehicle.
These improvements are attributed to the strategic scheduling of vehicle platoons, facilitating smoother traffic flows and optimizing lane usage.
Conclusion
The novel platoon-based controller presented in this paper effectively addresses key inefficiencies in intersection management, showcasing superior performance over traditional methods through empirical simulations. The research underscores the efficacy of integrating platooning strategies with centralized scheduling frameworks to achieve optimal traffic flow and reduced environmental impact. Future work could explore scaling the system for larger intersections and integrating more sophisticated communication networks to further enhance CIM performance.