Joint Communication and Control for Wireless Autonomous Vehicular Platoon Systems
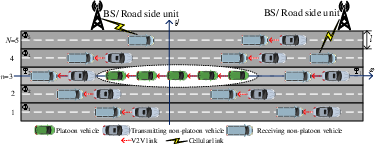
Abstract: Autonomous vehicular platoons will play an important role in improving on-road safety in tomorrow's smart cities. Vehicles in an autonomous platoon can exploit vehicle-to-vehicle (V2V) communications to collect information, such as velocity and acceleration, from surrounding vehicles so as to maintain the target velocity and inter-vehicle distance. However, due to the dynamic on-vehicle data processing rate and the uncertainty of the wireless channel, V2V communications within a platoon will experience a delay. Such delay can impair the vehicles' ability to stabilize the operation of the platoon. In this paper, a novel framework is proposed to optimize a platoon's operation while jointly consider the delay of the wireless network and the stability of the vehicle's control system. First, stability analysis for the control system is performed and the maximum wireless system delay requirements which can prevent the instability of the control system are derived. Then, delay analysis is conducted to determine the end-to-end delay, including queuing, processing, and transmission delay for the V2V link in the wireless network. Subsequently, using the derived delay, a lower bound and an approximated expression of the reliability for the wireless system, defined as the probability that the wireless system meets the control system's delay needs, are derived. Then, the control parameters are optimized to maximize the derived wireless system reliability. Simulation results corroborate the analytical derivations and study the impact of parameters, such as the platoon size, on the reliability performance of the vehicular platoon. More importantly, the simulation results disclose the benefits of integrating control system and wireless network design while providing guidelines for designing autonomous platoons so as to realize the required wireless network reliability and control system stability.



Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Collections
Sign up for free to add this paper to one or more collections.