- The paper introduces an IT-MPC framework that unifies planning and control by reducing KL divergence through importance sampling.
- It employs a sampling-based strategy in control space, achieving superior performance using neural network models compared to traditional approximations.
- Experimental results on the AutoRally platform demonstrate robust handling of aggressive maneuvers despite challenges like understeer.
Introduction
This essay discusses an approach to stochastic optimal control for autonomous driving utilizing an information theoretic model predictive control (IT-MPC) scheme. This method aims to expand the capacity of autonomous vehicles in aggressive driving scenarios where vehicles operate near their dynamic limits. Traditionally, autonomous control involves decomposing the control task into separate path planning and path tracking components, which limits the trajectory optimization to kinematic models. The proposed IT-MPC framework, however, integrates planning and control, providing a sampling-based optimization strategy directly in control space.

Figure 1: Aggressive autonomous driving with information theoretic model predictive control (IT-MPC).
The IT-MPC algorithm is based on a free energy construct in which control distributions are optimized by minimizing the Kullback-Leibler (KL) divergence between a controlled and an optimal distribution. The optimal control is computed iteratively by performing importance sampling, which updates control sequences through a probability-weighted expectation. The control updates are performed in every execution loop, resulting in real-time adaptability to dynamically changing conditions.
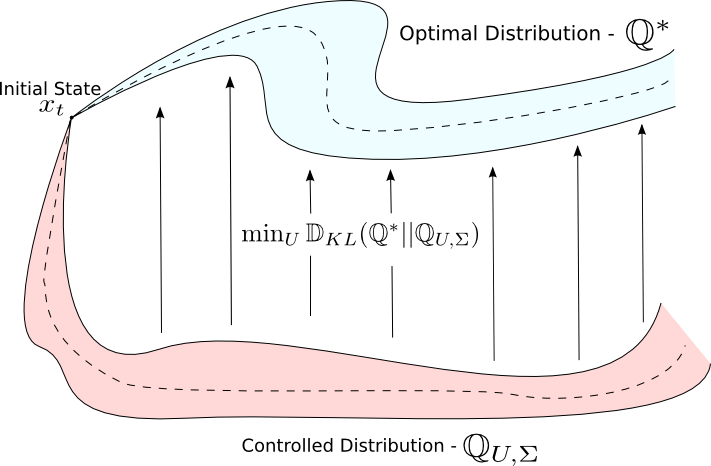
Figure 2: Visualization of the information theoretic control objective of ``pushing" the controlled distribution close to the optimal one.
A unique feature of IT-MPC is its reliance on sampling in control space, allowing it to adapt to nonlinearities and discontinuities inherent in high-speed driving scenarios on challenging surfaces like dirt tracks. Unlike classical model-based approaches, IT-MPC formulates a cost function with both soft and hard penalties, incorporating the vehicle's state and control inputs. This fusion enables a nuanced handling of path constraints, significantly improving adaptability and performance.
Application to Autonomous Driving
For experimental validation, the IT-MPC framework was tested on the AutoRally platform—a scaled-down autonomous vehicle with robust computational and sensory capabilities. The testing involved driving the vehicle around a dirt track, challenging the controller to handle aggressive maneuvers. IT-MPC was compared against a cross-entropy method (CEM-MPC) for baseline performance evaluations.
The dynamics of the vehicle were modeled in two ways: a neural network model, capturing complex nonlinear dynamics; and a basis function approximation, derived from traditional vehicle dynamic equations. Both models were instrumental in predicting future states of the vehicle, although the neural network model consistently provided superior performance in terms of prediction accuracy and control execution.
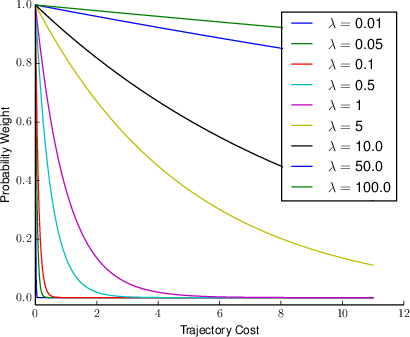
Figure 3: Effect of changing lambda on the probability weight corresponding to a trajectory cost. Low values of lambda result in many trajectories being rejected, high values of lambda take close to an un-weighted average.
Experimental Results
IT-MPC demonstrated exceptional capabilities in handling high-speed and aggressive maneuvers, notably performing better with the neural network model. The approach allowed for efficient handling of track boundaries and enabled controlled sliding during high-speed cornering, a key characteristic of racecar-like maneuvers.
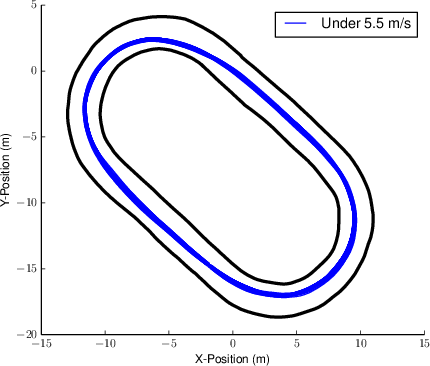
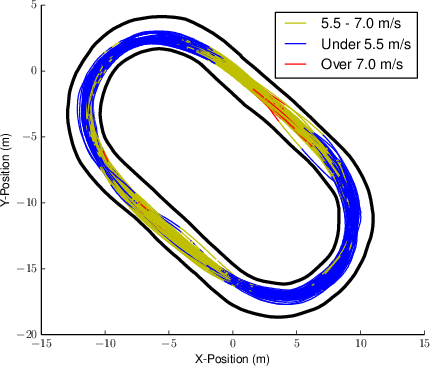
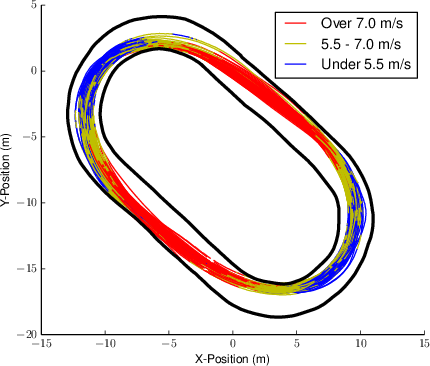
Figure 4: Top: Trajectory traces of IT-MPC controller using the neural network model at the 6 m/s (Top), 8.5 m/s (Middle), and 11 m/s (Bottom) target velocity. Each figure represents 100 laps, or approximately 6 kilometers of driving. Direction of travel is counter-clockwise.
Despite its successes, corners at high speeds introduced challenges, often manifesting in vehicle understeer. These scenarios illuminated the limitations of the vehicle dynamics model, particularly in asymmetric training data sets, which resulted in slight path deviations. Nevertheless, the IT-MPC effectively adjusted control strategies even under these conditions, highlighting its robustness.
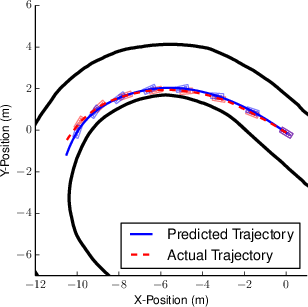
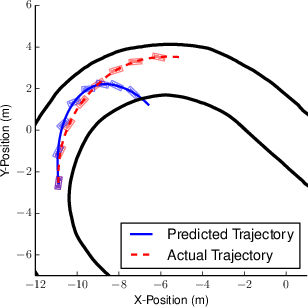
Figure 5: Neural network modeling error at 11 m/s target. Going counter-clockwise the model prediction is accurate, but clockwise, the model predicts severe over-steer when it should have predicted under-steer.
Discussion
The exploration of IT-MPC for autonomously navigating aggressive driving situations provides compelling evidence of its robustness and adaptability. With a model predictive control perspective, IT-MPC synthesizes complex decision-making processes into efficient real-time control updates, setting a new benchmark for autonomous racing and dynamic vehicle tasks. Future developments will hinge on expanding the framework to accommodate a wider array of environmental interactions, alongside improvements in model accuracy and dynamic prediction fidelity.
Conclusion
The IT-MPC framework leverages principles of information theory to formulate a robust control strategy for autonomous vehicles in high-speed, aggressive driving tasks. This novel approach offers a potent alternative to traditional path-planning methodologies, delivering adaptive, real-time decision-making capabilities for complex environments. Through extensive testing, IT-MPC has shown promise in expanding the operational potential of autonomous systems, especially in scenarios demanding extreme precision and agility.

